elementui
Promise
devops
程序员
基因组学
非线性方程求解
健身私教预约系统
业界资讯
多模态
off heap
在线聊天室
ci/cd
模块测试
信号完整性
optee
C 语言
安卓毕设
EmberZnet
方案
解压
MPC
2024/4/12 12:39:23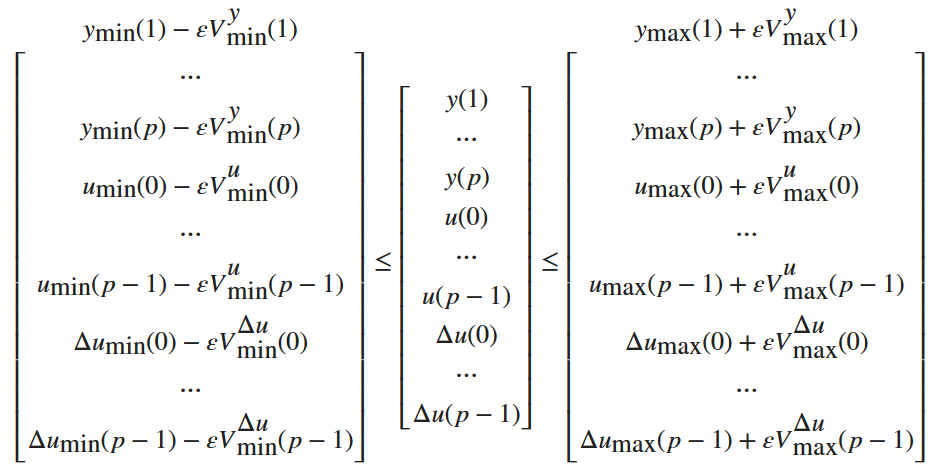
MATLAB - MPC - 优化问题(Optimization Problem)
系列文章目录 前言
模型预测控制可在每个控制间隔内解决一个优化问题,具体来说就是二次规划(QP)。求解结果决定了被控对象在下一个控制间隔之前使用的操纵变量(MV)。
该 QP 问题具有以下特点:
目标或 "成本 "函数 - …
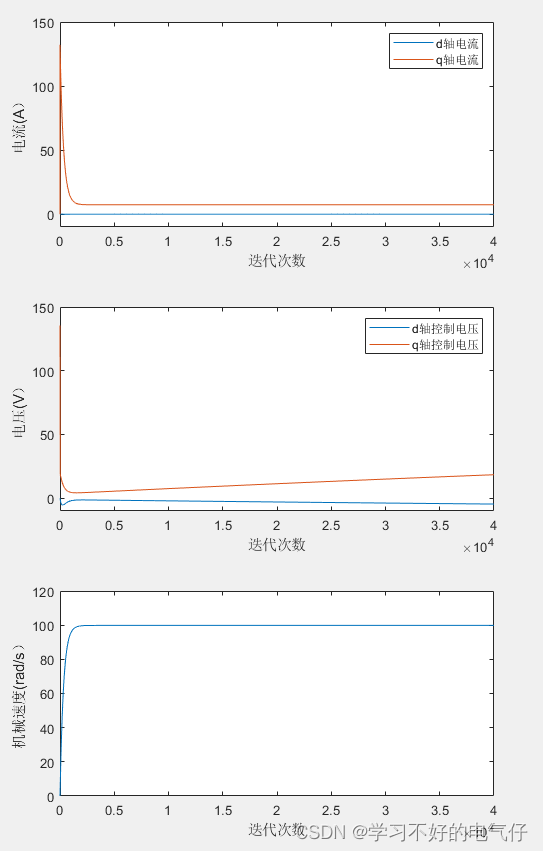
26基于模型预测控制MPC的永磁同步电机MATLAB代码
资源地址:
基于模型预测控制(MPC)的永磁同步电机Matlab代码-电子商务文档类资源-CSDN文库
主要内容:
包含单电流环MPC仿真(仅电流环使用MPC策略,速度环使用PI调节器)、速度环和电流环MPC仿真…
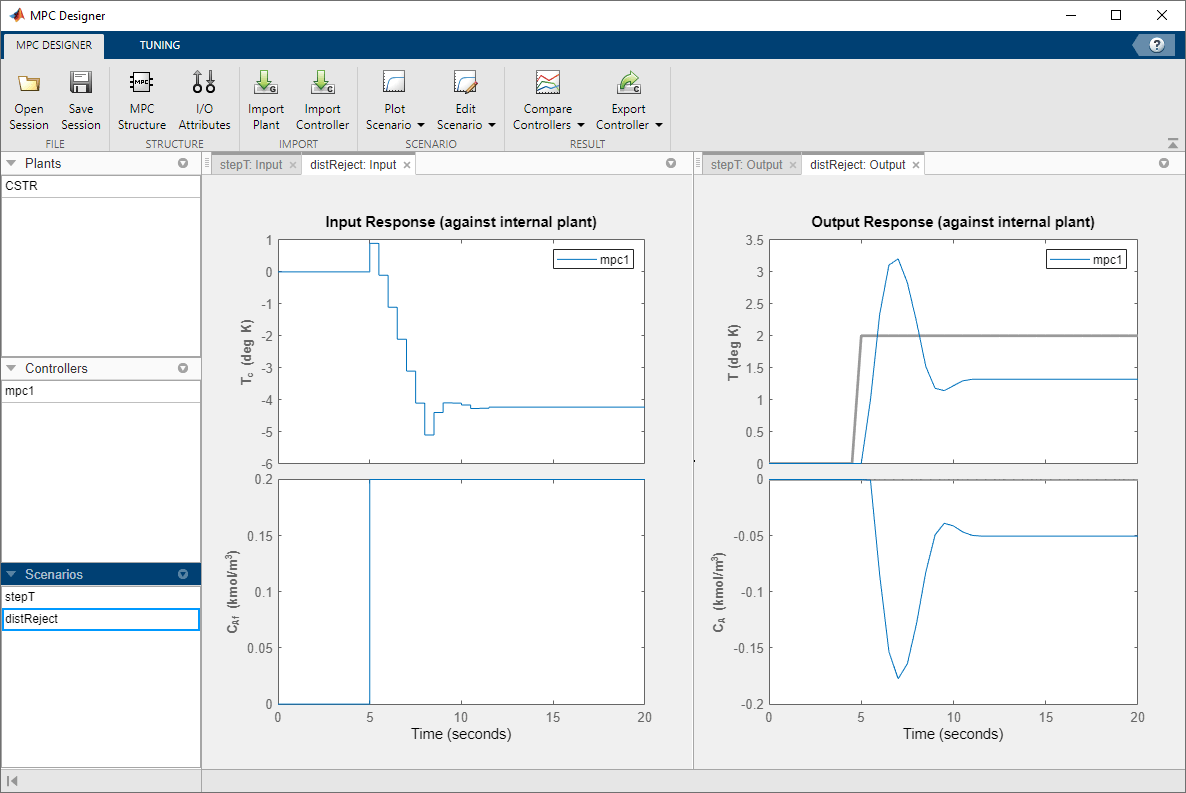
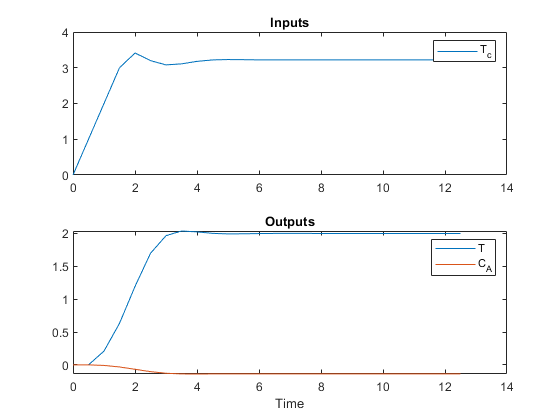
MATLAB 模型预测控制(MPC)控制入门 —— 设计并仿真 MPC 控制器
系列文章目录 文章目录 系列文章目录前言一、使用 MPC Designer 设计控制器1.1 CSTR 模型1.2 导入被控对象并定义 MPC 结构1.3 定义输入和输出通道属性1.4 配置仿真场景1.5 配置控制器水平线1.6 定义输入约束条件1.7 指定控制器调整权重1.8 消除输出超调1.9 测试控制器抗干扰能…
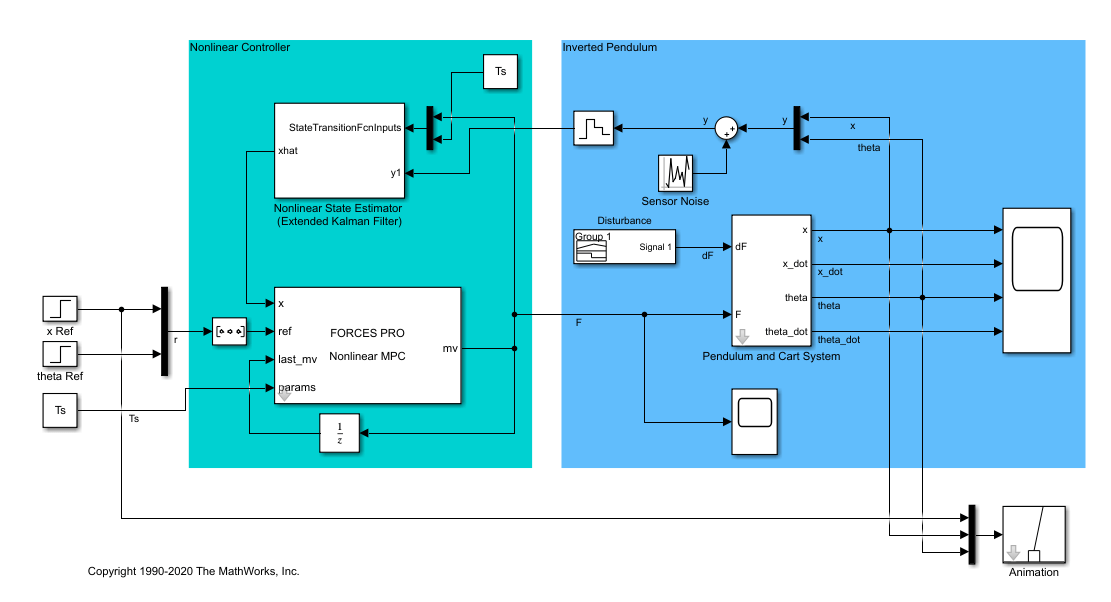
一级倒立摆控制 - 非线性 MPC 控制及 MATLAB 实现
系列文章目录 前言
本示例使用非线性模型预测控制器对象和块实现对小车上倒立摆的摆动和平衡控制。
本示例需要 Optimization Toolbox™ 软件为非线性 MPC 提供默认的非线性编程求解器,以计算每个控制间隔的最优控制动作。 一、摆锤/小车装配
本例中的被控对象是…

实时最优控制(Real-Time Optimal Control)工具
系列文章目录 前言
许多现代控制方法,如模型预测控制(model-predictive control),在很大程度上依赖于实时解决优化问题。特别是,高效解决优化控制问题的能力使复杂机器人系统在实现高动态行为(highly dyna…
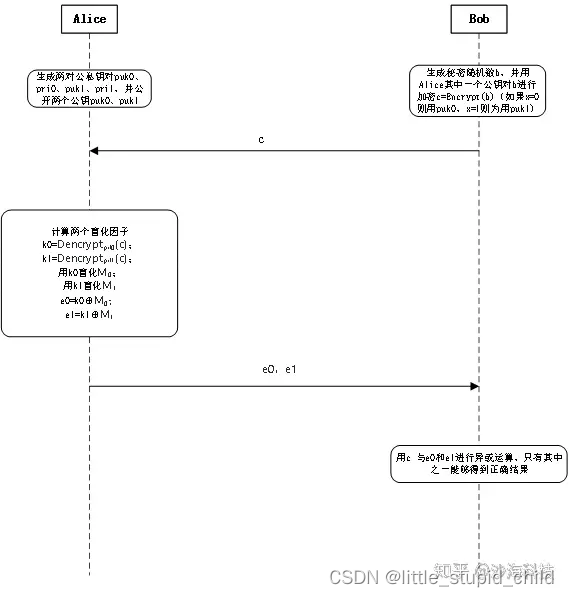
【密码学】【多方安全计算】不经意传输(Oblivious Transfer,OT)
文章目录 不经意传输(oblivious transfer)定义不经意传输的实例(1 out 2,二选一不经意传输)基于RSA的1 out 2 不经意传输疑问 不经意传输(oblivious transfer)定义
不经意传输(obli…

联邦学习之安全聚合SMPC
联邦学习之安全聚合联邦学习过程1. 设备选择2. 参数分发3. 本地更新4. 全局更新5.收敛判停DSSGDFedAVG安全聚合SMPCDH密钥交换秘密分享secret share引理1Shamir′s Secret Sharing with 2−out−of−3 (t 2, n 3)FedAVG场景Masking with One-Time Pads场景Masking with One-T…

《预测控制》学习记录二-DMC的内模控制结构(IMC)分析
书中是讲完DMC接着讲的GPC,不过我想接着写DMC,将DMC的有关内容写完。 预测控制的部分先不写了,先去学点数学知识 上一篇文章写了在无约束单输入单输出情况下的DMC的原理,及其仿真。我在仿真时取NPM20,所以至少有40个参数可以调…
MPC 101:安全多方计算与多方签名
1982年,姚期智先生,图灵奖获得者,在他的论文中提出了安全多方计算这一重要概念。为了形象地介绍安全多方计算这个概念,他提出了著名的「百万富翁问题」。 两个百万富翁在街头碰面,为了争一口气,希望 PK 出谁更加富有,同时希望能让对方不知道自己资产的真实数额。 这篇论…
MATLAB - 用命令行设计 MPC 控制器
系列文章目录 前言 本例演示如何通过命令行创建和测试模型预测控制器。 一、定义工厂模型 本示例使用《使用 MPC Designer 设计控制器》中描述的工厂模型。创建工厂的状态空间模型,并设置一些可选的模型属性,如输入、状态和输出变量的名称和单位。
% co…

强化学习MPC——(二)
本篇主要介绍马尔科夫决策(MDP)过程,在介绍MDP之前,还需要对MP,MRP过程进行分析。 什么是马尔科夫,说白了就是带遗忘性质,下一个状态S_t1仅与当前状态有关,而与之前的状态无关。 为…
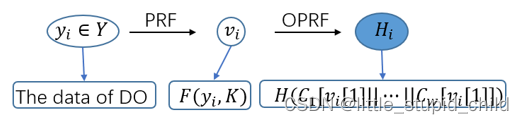
【密码学】【安全多方计算】浅析隐私求交PSI
文章目录 隐私求交的定义隐私求交方案介绍1. 基于DH的PSI方案2. 基于OT的PSI方案3.基于OPRF的PSI方案 总结 隐私求交的定义
隐私集合求交使得持有数据参与方通过计算得到集合的交集数据,而不泄露任何交集以外的数据信息。
隐私求交方案介绍
1. 基于DH的PSI方案
…
MPC Multiparty Threshold ECDSA (GG18实现原理)
目录 1. 简介
2. Generic DSA signature
2.1. ECDSA 门限签名的难点
3. 主要思路
3.1. 求签名中的 r
3.2. 求签名中的 s
4. 协议描述
4.1. Distributed Key Generation
4.2. Signature Generation
5. GG18 VS.

席裕庚《预测控制》学习记录 (一)-基于阶跃响应的动态矩阵控制(DMC)包含仿真
本文除了黑体部分均为《预测控制》一书中的知识点,感觉像之前的ADRC只放个仿真不太好,就把原理也写上了
简介
模型预测控制(Model Predictive Control,MPC),或简称预测控制。 最早产生于工业过程的预测控制算法,…

MPC模型预测控制器学习笔记(附程序)
本文用于记录学习DR_CAN老师发布的MPC系列视频教程的相关内容,文章中放的源码也是DR_CAN老师提供的程序示例,链接如下: DR_CAN老师的视频教程链接(点击可跳转) DR_CAN老师提供的程序示例(点击可跳转&#x…
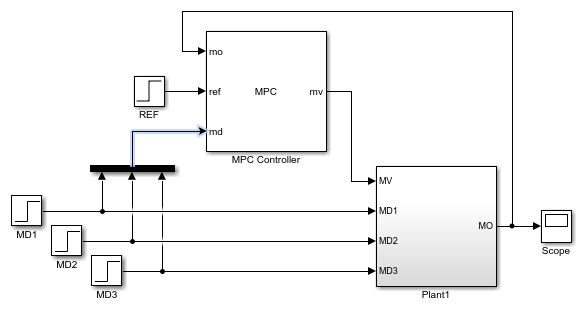
MATLAB - 使用 MPC Designer 线性化 Simulink 模型
系列文章目录 前言
本主题介绍如何使用 MPC Designer 对 Simulink 模型进行线性化。为此,请从包含 MPC 控制器块的 Simulink 模型打开该应用程序。本例中使用 CSTR_ClosedLoop 模型。
open_system(CSTR_ClosedLoop) 在模型窗口中,双击 MPC 控制器模块。…
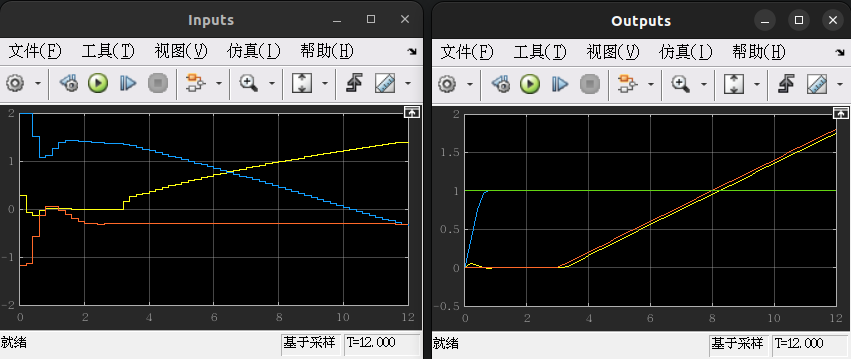
Matlab:多输入多输出非线性对象的模型预测控制(MPC, Model Predictive Control)的实现
Matlab:多输入多输出非线性对象的模型预测控制的实现一、非线性对象的线性化1.1 线性化过程1.2 I/O变量分配名称二、设计模型预测控制(MPC, Model Predictive Control)控制器三、使用Simulink进行闭环仿真四、修改MPC设计跟踪斜坡信号🏠 Matlab MIMO MPC…

自动驾驶学习笔记(九)——车辆控制
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
控制器设计
比例积分微分控制
线性…

TinyMPC - CMU (卡耐基梅隆大学)开源的机器人 MPC 控制器
系列文章目录
CasADi - 最优控制开源 Python/MATLAB 库 文章目录 系列文章目录前言一、机器人硬件对比1.1 Teensy 上的微控制器基准测试1.2 机器人硬件1.3 BibTeX 二、求解器三、功能(预期)3.1 高效3.2 鲁棒3.3 可嵌入式3.4 最小依赖性3.5 高效热启动3.…