STM32 学习2 库函数控制GPIO输出
- 一、GPIO寄存器介绍
- 1. GPIO简介
- 2. GPIO功能
- (1)模式分类
- (2)模式设置方法
- MODE[1:0]:模式控制,用于配置端口引脚的模式:
- CNF[1:0]:配置引脚输出速度:
- PUPD[1:0]:上拉/下拉配置:
- (3)**输入模式**:
- (4)**输出模式**:
- 3. GPIO的寄存器
- (1)两个32位配置寄存器
- (2)两个32位数据寄存器
- (3)一个32位置位/复位寄存器:GPIOx_BSRR
- (4)一个16位复位寄存器:GPIOx_BRR
- (5)一个32位锁定寄存器:GPIOx_LCKR
- 4. 时钟控制器
- 二、GPIO配置
- 1. 配置内容
- 2. 配置结构体
- (1)GPIO_Pin:
- (2)Mode:
- (3)Speed:
- (4)OType:
- (5)PuPd:
- 三、GPIO使用步骤
- 四、代码示例
- 1. 跑马灯显示
- 2. 显示数字

一、GPIO寄存器介绍
1. GPIO简介
GPIO是STM32微控制器上的一组引脚,可配置为输入或输出模式,用于与外部设备进行数字信号交换。每个GPIO引脚都有一个唯一的编号,通常称为引脚名称或引脚号码。
STM32系列微控制器通常具有多个GPIO引脚,数量取决于具体型号。
GPIO模块是STM32微控制器中非常重要的功能之一,它允许微控制器与外部设备进行数字信号交换。通过正确配置和使用GPIO,可以实现各种应用,包括传感器接口、控制输出设备等。
2. GPIO功能
(1)模式分类
GPIO端口的每个位可以由软件分别配置成多种模式:
- 输入浮空
- 输入上拉
- 输入下拉
- 开漏输出
- 推挽式输出
- 推挽式复用功能
- 开漏复用功能
(2)模式设置方法
通过设置: GPIOx_CRL/CRH,具体有:
MODE[1:0]:模式控制,用于配置端口引脚的模式:
- 00:输入模式
- 01:输出模式
- 10:复用功能模式
- 11:模拟输入模式
CNF[1:0]:配置引脚输出速度:
- 00:低速
- 01:中速
- 10:高速
- 11:最高速
PUPD[1:0]:上拉/下拉配置:
- 00:无上拉/下拉
- 01:上拉
- 10:下拉
- 11:保留
这些值一般在使用寄存器编程需要用到,使用库函数时直接使用系统定义的宏来设置,一般定义如下:
- GPIO_Mode_IN:输入模式,用于将GPIO引脚配置为输入模式。
- GPIO_Mode_OUT:输出模式,用于将GPIO引脚配置为输出模式。
- GPIO_Mode_AF:复用模式,用于将GPIO引脚配置为复用模式,通常用于连接外设。
- GPIO_Mode_AN:模拟模式,用于将GPIO引脚配置为模拟模式,用于ADC输入等。
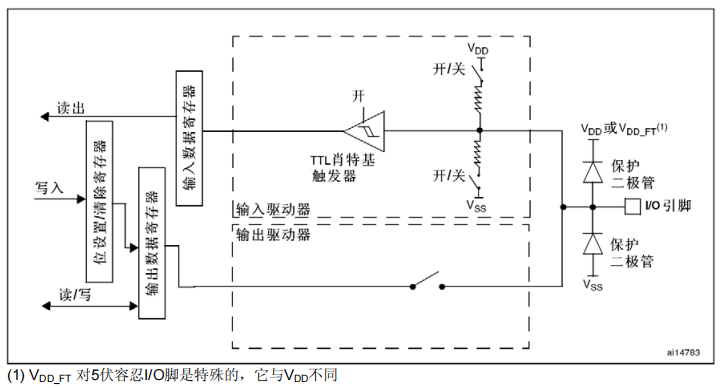
(3)输入模式:
GPIO引脚可以用于读取外部设备的数字信号。在输入模式下,引脚可以被连接到传感器、开关、按钮等外部设备,并且微控制器可以读取这些设备的状态(高电平或低电平)。
下图是I/O端口位的输入设置:
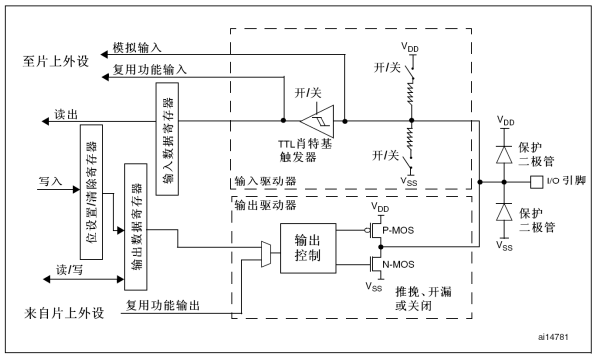
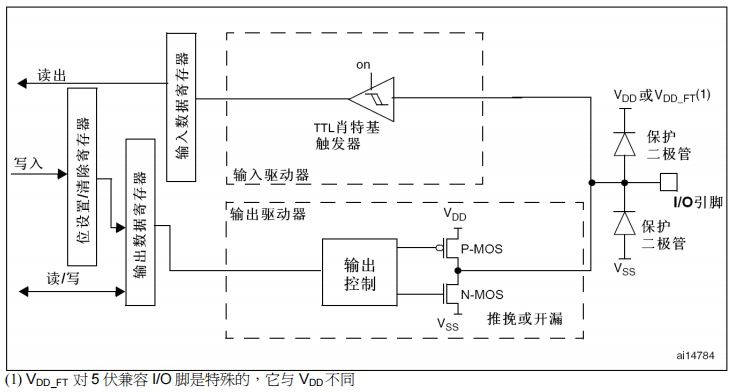
(4)输出模式:
GPIO引脚可以用于向外部设备发送数字信号。在输出模式下,微控制器可以控制引脚的状态,输出高电平或低电平信号,从而驱动LED、继电器、马达等外部设备。
输出IO端口位配置:
3. GPIO的寄存器
在STM32系列微控制器中,GPIO的配置和控制通过一系列特定的寄存器完成。这些寄存器提供了对GPIO引脚的各种配置选项和控制功能。
每个GPIO端口有:
(1)两个32位配置寄存器
控制端口引脚的模式、输出速度和上拉/下拉配置。
- GPIOx_CRL
- GPIOx_CRH,
(2)两个32位数据寄存器
- GPIOx_IDR:输入数据寄存器,读取端口引脚的电平状态。
- GPIOx_ODR:输出数据寄存器,设置端口引脚的电平状态。
(3)一个32位置位/复位寄存器:GPIOx_BSRR
用于设置或复位端口引脚的电平。
(4)一个16位复位寄存器:GPIOx_BRR
用于复位端口引脚的电平。
(5)一个32位锁定寄存器:GPIOx_LCKR
锁定寄存器,用于锁定GPIO端口的配置。
4. 时钟控制器
在STM32微控制器中,每个GPIO端口都需要单独打开时钟以激活其功能。时钟控制器(Clock Controller)是用来控制微控制器内部各个模块的时钟信号的,包括GPIO模块。通过打开相应GPIO端口的时钟,可以使得该端口的GPIO模块开始正常工作。
二、GPIO配置
1. 配置内容
在STM32中,使用寄存器对GPIO进行配置和控制。常见的GPIO配置包括以下几个步骤:
-
选择引脚模式:确定引脚是作为输入还是输出。这通常涉及设置相应的寄存器位。
-
配置引脚速率:根据需求选择引脚的输出速率,以适应外部设备的要求。速率通常包括低速、中速、高速等选项。
-
配置引脚上下拉:根据需要启用或禁用引脚的上拉或下拉电阻,以确保在未连接外部设备时引脚的稳定状态。
-
配置引脚中断(可选):如果需要,可以配置引脚触发中断,以便在引脚状态发生变化时触发微控制器的中断服务程序。
2. 配置结构体
GPIO配置结构体是一个用于配置GPIO引脚参数的数据结构,面是一个典型的GPIO配置结构体的说明:
typedef struct {
uint32_t GPIO_Pin; // GPIO引脚编号,可以是单个引脚或者多个引脚的组合,如 GPIO_Pin_0 | GPIO_Pin_1
GPIOMode_TypeDef Mode; // GPIO引脚的工作模式,包括输入模式、输出模式、复用模式等
GPIOSpeed_TypeDef Speed; // GPIO引脚的输出速率,通常有低速、中速、高速可选
GPIOOType_TypeDef OType; // GPIO引脚的输出类型,通常有推挽输出和开漏输出两种类型
GPIOPuPd_TypeDef PuPd; // GPIO引脚的上拉/下拉电阻状态,可以选择无上拉/下拉、上拉、下拉
} GPIO_InitTypeDef;
初始化:
GPIO_InitTypeDef GPIO_InitStruct;
(1)GPIO_Pin:
表示需要配置的GPIO引脚的编号,可以使用GPIO_Pin_X的形式表示单个引脚,也可以使用按位或操作将多个引脚组合在一起,例如 GPIO_Pin_0 | GPIO_Pin_1 表示同时配置GPIO引脚0和1。
(2)Mode:
表示GPIO引脚的工作模式,包括输入模式(GPIO_Mode_IN)、输出模式(GPIO_Mode_OUT)、复用模式(GPIO_Mode_AF)等。根据具体应用需求选择合适的工作模式。
示例:
GPIO_InitStruct.Mode = GPIO_Mode_IN; // 输入模式
GPIO_InitStruct.Mode = GPIO_Mode_OUT; // 输出模式
GPIO_InitStruct.Mode = GPIO_Mode_AF; // 复用模式
如果是输出模式,还需要选择引脚的类型,通常有推挽输出和开漏输出两种类型。
GPIO_InitStruct.Mode = GPIO_Mode_OUT; // 输出模式
GPIO_InitStruct.Mode = GPIO_Mode_Out_PP; // 推挽输出
GPIO_InitStruct.Mode = GPIO_Mode_Out_OD; // 开漏输出
(3)Speed:
表示GPIO引脚的输出速率,通常有低速(GPIO_Speed_2MHz)、中速(GPIO_Speed_50MHz)、高速(GPIO_Speed_100MHz)可选。选择合适的输出速率可以满足不同应用的需求。
示例:
GPIO_InitStruct.Speed = GPIO_Speed_2MHz; // 2MHz输出速率
GPIO_InitStruct.Speed = GPIO_Speed_50MHz; // 50MHz输出速率
GPIO_InitStruct.Speed = GPIO_Speed_100MHz; // 100MHz输出速率
(4)OType:
表示GPIO引脚的输出类型,包括推挽输出(GPIO_OType_PP)和开漏输出(GPIO_OType_OD)两种类型。推挽输出适用于驱动电平信号,而开漏输出适用于驱动开关或者双向总线。
(5)PuPd:
表示GPIO引脚的上拉/下拉电阻状态,可以选择无上拉/下拉(GPIO_PuPd_NOPULL)、上拉(GPIO_PuPd_UP)、下拉(GPIO_PuPd_DOWN)。根据实际连接情况选择合适的上拉/下拉电阻状态。
示例:
GPIO_InitStruct.Pull = GPIO_PuPd_NOPULL; // 无上拉/下拉
GPIO_InitStruct.Pull = GPIO_PuPd_UP; // 上拉
GPIO_InitStruct.Pull = GPIO_PuPd_DOWN; // 下拉
配置完成后,可以使用GPIO_Init()函数将配置应用到GPIO引脚上:
GPIO_Init(GPIOA, &GPIO_InitStruct); // 将配置应用到 GPIOA 端口上
三、GPIO使用步骤
以下是使用STM32的GPIO的一般步骤:
- 打开GPIO端口时钟;
- 初始化GPIO模块:在程序开始时,需要初始化GPIO模块,配置所需的引脚为输入或输出,并设置其他相关参数;
- 读取输入引脚状态:如果引脚配置为输入模式,可以使用相应的函数或指令来读取引脚的状态,判断外部设备的状态;
- 设置输出引脚状态:如果引脚配置为输出模式,可以使用相应的函数或指令来设置引脚的状态,向外部设备发送所需的信号;
- 处理中断(可选):如果配置了中断,需要编写相应的中断服务程序来处理引脚状态变化时的事件。
四、代码示例
1. 跑马灯显示
实验使用普中开发板,LED电路如下:
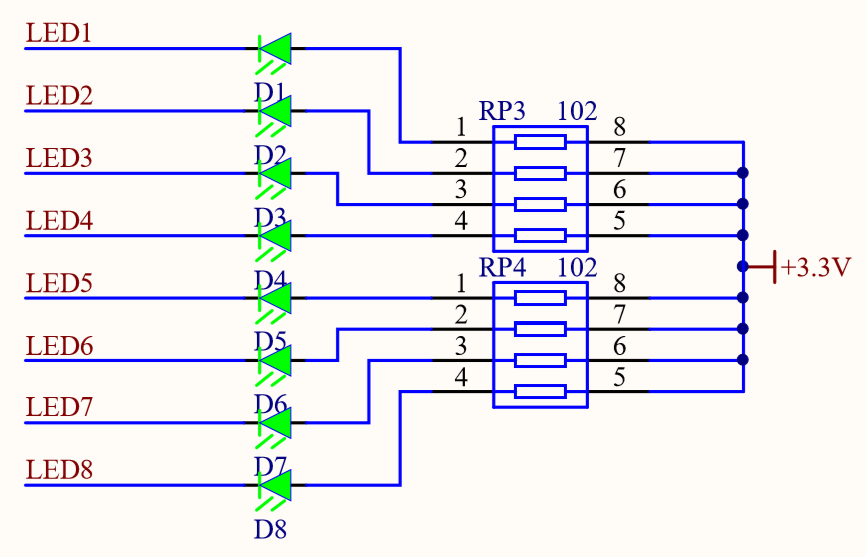
LED1的阴极连接在芯片的26号引脚PC0(GPIO端口C的第0管脚)上,当PC0输出低电平时,发光二极管正向导通,D1被点亮。因此,对PC0进行操作即可控制LED1。
#include "stm32f10x_lib.h" //包含所有的STM32F10x库的头文件
#include <stdio.h>
// GPIO配置函数
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义GPIO初始化结构体
// 开启GPIOC的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
// 设置GPIOC的模式为推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All; //选择所有的pin
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置输出速度为50MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //设置为推挽输出模式
GPIO_Init(GPIOC, &GPIO_InitStructure); //初始化GPIOC
}
// 延时函数
void delay(u32 i)
{
while (i--) //当i不为0时,持续减1,实现延时
;
}
// 打开指定位置的LED
void on(int position)
{
// GPIOC->BSRR = (1 << (16 + position)); //通过设置BSRR寄存器,关闭指定位置的LED
GPIO_ResetBits(GPIOC, GPIO_Pin_0 << position); //
}
// 关闭指定位置的LED
void off(int position)
{
// GPIOC->BSRR = (1 << (position)); //通过设置BSRR寄存器,打开指定位置的LED
GPIO_SetBits(GPIOC, GPIO_Pin_0 << position);
}
// 主函数
int main(void)
{
GPIO_Configuration(); //调用GPIO配置函数
int j;
//GPIOC->BRR = GPIO_Pin_0; //关闭0号位的LED
GPIO_SetBits(GPIOC, GPIO_Pin_All);
while (1) //无限循环
{
for (j = 0; j < 8; j++) //遍历0到7号位
{
on(j); //打开j号位的LED
delay(0xfffff); //延时
off(j); //关闭j号位的LED
delay(0xfffff); //延时
}
}
}
可以设置断点,打开GPIOA的查看窗口查看运行状态 :
2. 显示数字
#include "stm32f10x_lib.h" //包含所有的STM32F10x库的头文件
#include <stdio.h>
int arr[10][7] = {
{0,1,2,3,4,5},
{1,2},
{0,1,6,4,3},
{0,1,6,2,3},
{5,6,1,2},
{0,5,6,2,3},
{0,5,6,4,3,2},
{0,1,2},
{0,1,2,3,4,5,6},
{0,1,2,3,5,6}
};
// GPIO配置函数
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义GPIO初始化结构体
// 开启GPIOC的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
// 设置GPIOC的模式为推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All; //选择所有的pin
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置输出速度为50MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //设置为推挽输出模式
GPIO_Init(GPIOC, &GPIO_InitStructure); //初始化GPIOC
}
// 延时函数
void delay(u32 i)
{
while (i--) //当i不为0时,持续减1,实现延时
;
}
// 打开指定位置的LED
void on(int position)
{
GPIO_ResetBits(GPIOC, GPIO_Pin_0 << position); //
}
// 关闭指定位置的LED
void off(int position)
{
GPIO_SetBits(GPIOC, GPIO_Pin_0 << position);
}
void onArray(int array[], int len){
int j;
for(j=0;j<len;j++){
on(array[j]);
}
}
int count(int n){
int len = 1;
for (int i = 1; i < 7; i++) {
if (arr[n][i] != '\0') {
len++;
} else {
break;
}
}
return len;
}
void lightn(int n){
// 计算onArray 第二个参数,即二维数组第二维长度
int len = count(n);
onArray(arr[n], len);
}
void allOff(){
GPIO_SetBits(GPIOC, GPIO_Pin_All);
}
// 主函数
int main(void)
{
GPIO_Configuration(); //调用GPIO配置函数
int j;
GPIO_SetBits(GPIOC, GPIO_Pin_All);
while (1) //无限循环
{
for(int i=0;i<10;i++){
lightn(i);
delay(0xfffff);
allOff();
delay(0xff);
}
}
}
本文代码开源地址:
https://gitee.com/xundh/stm32_arm_learn