目录 1.Introduction
2. Related work
3. Proposed method
3.1. Lane and anchor representation
3.2. Backbone
3.4. Attention mechanism
3.5. Proposal prediction
3.7. Model training
3.8. Anchor fifiltering for speed effificiency
4. Experiments
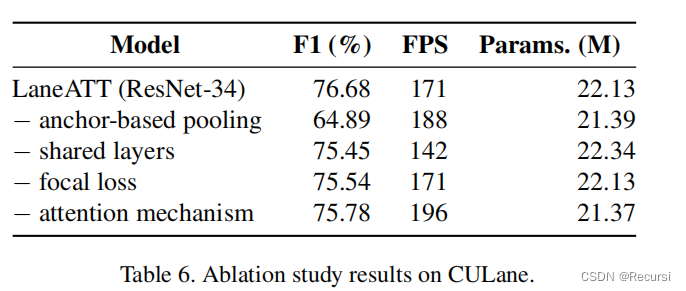
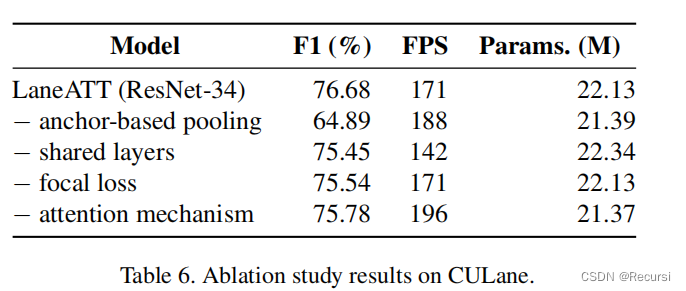
4.2. CU…
目录
Abstract
2. Related Works
2.2. Deformable Modeling
3. Method
3.1. Global Keypoint Association
3.1.2 Starting Point Regression
3.1.3 Lane Construction
3.2. Lane-aware Feature Aggregator
4.Experiment
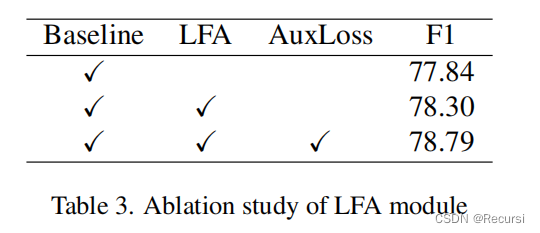
4.2.3 Ablation Study Abstract
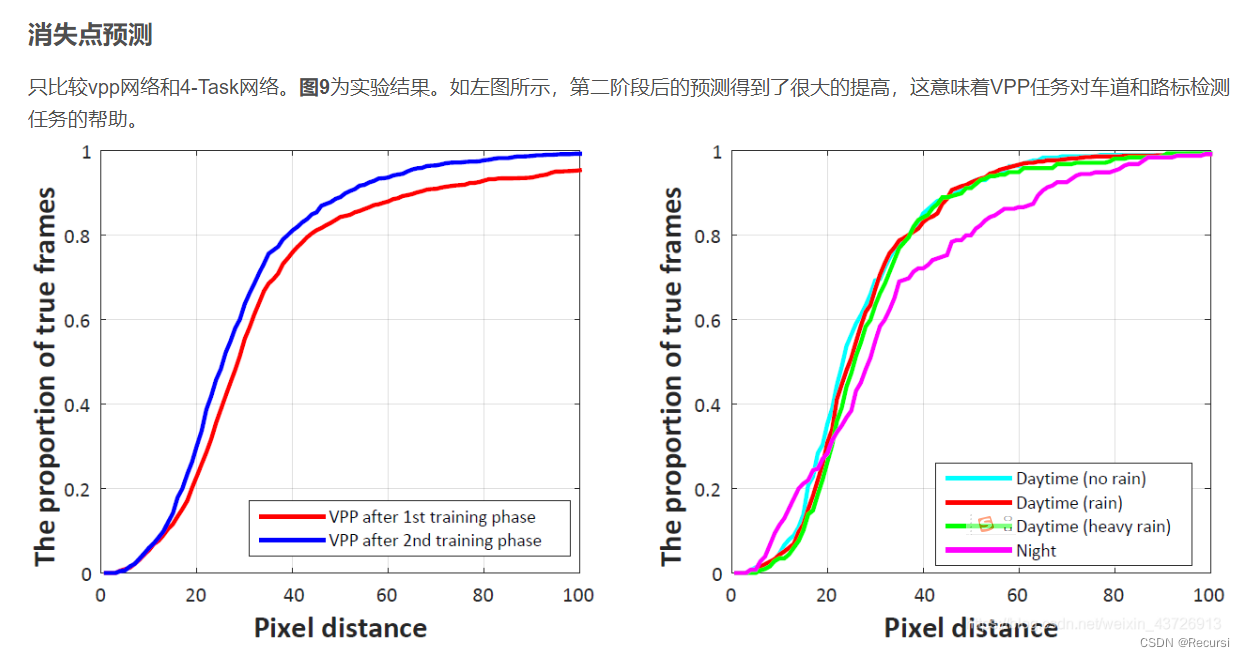
提出一种新的…
目录 Abstract 1. Introduction 2. Related Work 3. Proposed Method 3.1. Network Architecture Horizontal Reduction Module: 3.2. Training Lane Marker Vertex Location Loss: 4. Experiments 4.1. Results 4.2. Ablation Experiments The number of shared HRM: Loss fun…