Differential feature fusion convolutional neural network
- 基于差分特征融合CNN的轨道交通目标检测
- I. INTRODUCTION
- II. RELATED WORKS
- III. NETWORK ARCHITECTURE
- A. Prior Detection Module
- B. Object-Detection Module
- V. CONCLUSION
基于差分特征融合CNN的轨道交通目标检测
基于差分特征融合CNN的轨道交通目标检测,是铁路轨道中的小目标检测。其核心差分特征融合卷积神经网络(DFF-Net:Differential feature fusion convolutional neural network ),因为没找到源代码,所以这篇论文的重点放在了理解这个模型的各个部分,差分特征融合就是一个新的启发思路。
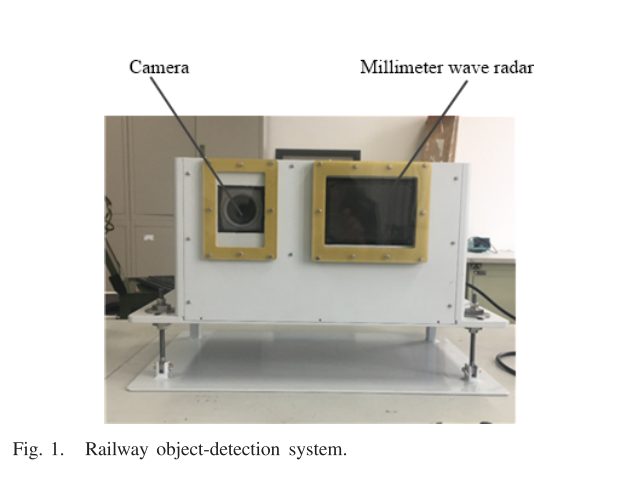
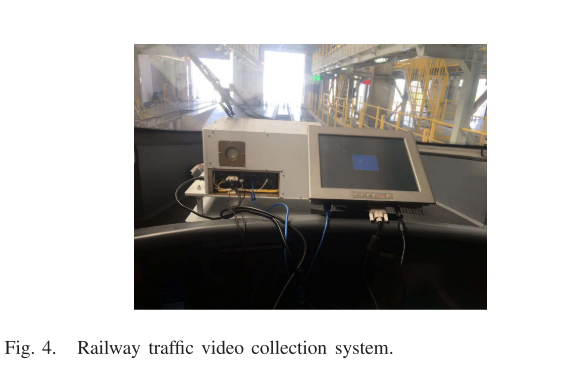
实物图:
I. INTRODUCTION
注意力来到DFF-Net:我们提出了DFF-Net,它是一个具有全卷积网络结构的端到端目标检测网络。该网络包括两个模块:现有物体检测模块和物体检测模块。前者为后续模块生成初始锚点。对象检测模块以先前的锚盒为输入,利用子模块,差分特征融合模块,用于目标检测。所提出的DFF-Net在精度和实时性之间取得了很好的折衷。
II. RELATED WORKS
在本研究中,我们设计了一个先验目标检测模块来生成初始锚盒,并对来自先验检测模块的不同特征图采用差分卷积运算来平衡计算复杂度和检测准确度。因此,该方法具有较高的精度和实时性。
III. NETWORK ARCHITECTURE
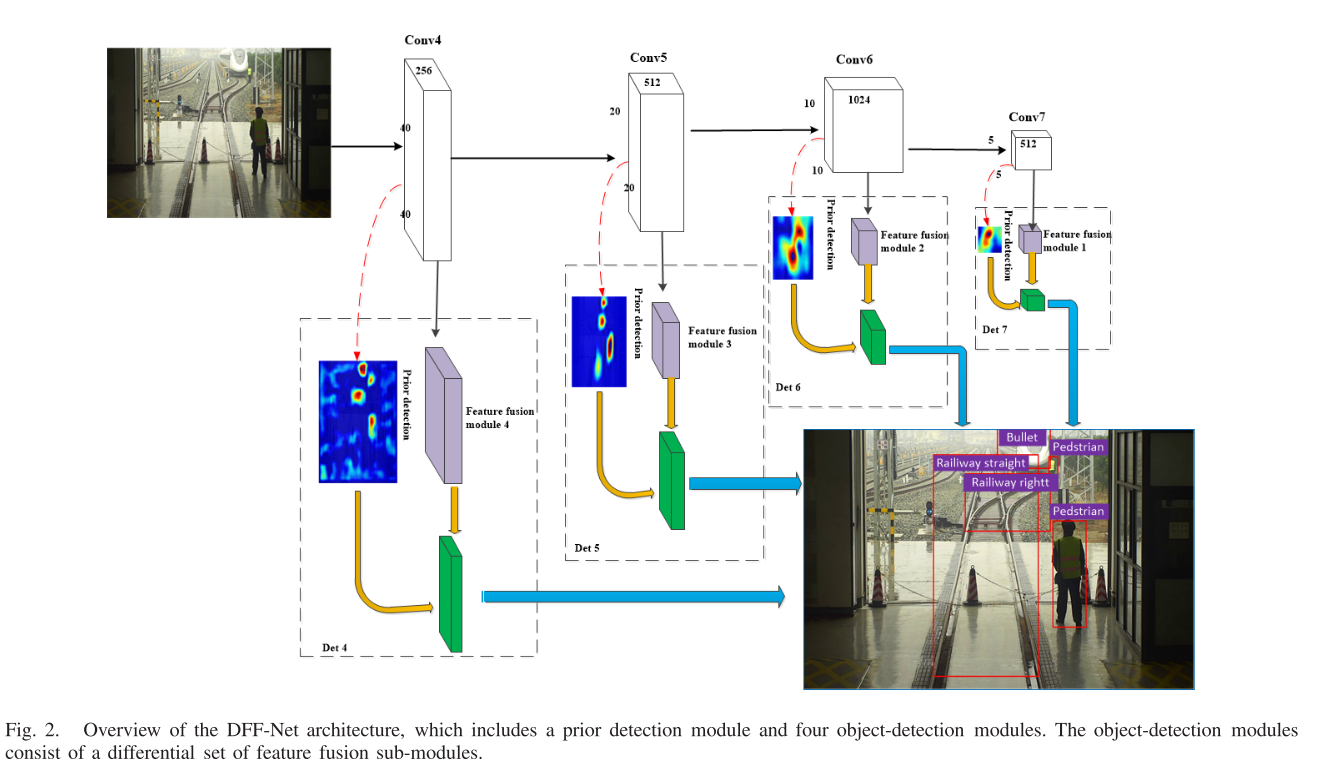
DFF-Net架构概述,包括一个先验检测模块和四个目标检测模块。目标检测模块由一组差分特征融合子模块组成。
在本研究中,我们使用DFF-Net来侦测真实世界中的铁路交通目标。
网络的默认输入大小为320 × 320 × 320。
它包括两个模块:先验检测模块和目标检测模块
- 先验检测模块使用VGG-16构建,我们在ImageNet上对VGG-16进行了预训练。对象检测模块旨在回归精确的对象检测并预测先前框的类别。它生成固定数量的锚框并预测对象的分类得分是否属于对象
- 目标检测模块由称为特征融合模块的子模块组成,该子模块产生目标类别的得分和对应于先前锚框的位置偏移。随后,通过非最大值抑制(NMS)产生最终结果
A. Prior Detection Module
为了提高一步法的准确性,设计了一个先验检测模块,利用两步级联回归法对目标的位置和大小进行回归。
单元格在特征图中规则地分布,并且每个先前锚盒具有相对于其对应单元格的固定初始位置。特征映射中的每个单元格具有n个先前锚框。
我们设计了一个策略,其中指定的特征映射位置与特定比例的锚点相关联。大的特征图负责小尺度对象检测,而小的特征图对应于大尺度对象检测。(PS:大特征图能读取更多细节信息)
与使用区域提议网络的Faster R-CNN相比,该方法产生具有多尺度的先验锚盒以及传统的SSD。
先验检测模块提供先验位置信息,用于在下一模块中进行更准确的检测。此外,这缩小了搜索空间,提高了对象检测精度。
B. Object-Detection Module
目标检测模块概述(四个差分特征融合子模块),目标检测模块由一组不同的特征融合子模块组成,在两阶段检测方法中执行通过扩大候选建议锚框周围的窗口来合并上下文。
DFF-Net通过简单的卷积层来模拟这种策略。考虑到不同特征图的大小和计算复杂度,对来自先验检测模块的不同特征图采用不同的卷积运算。差分融合特征可以提供足够的特征信息并且允许有效地检测对象。
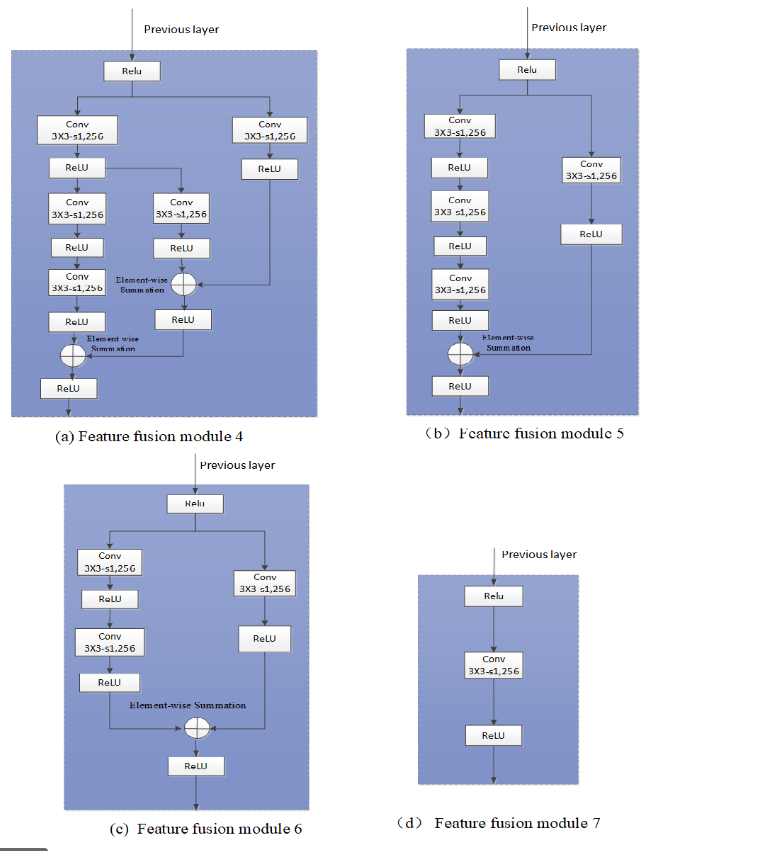
细看每一个:
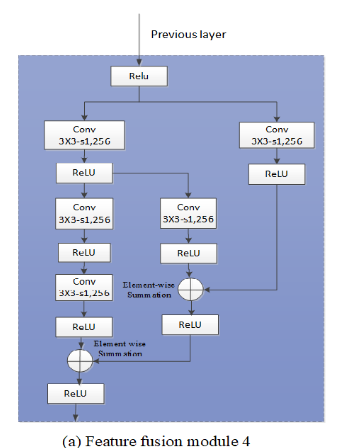

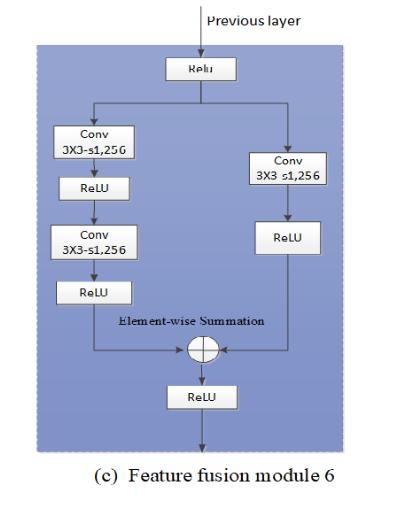
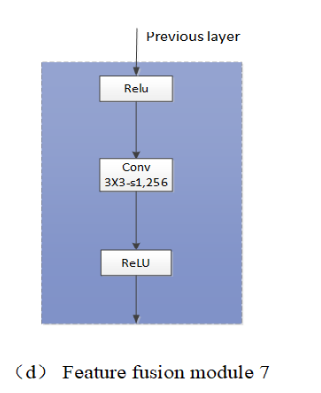
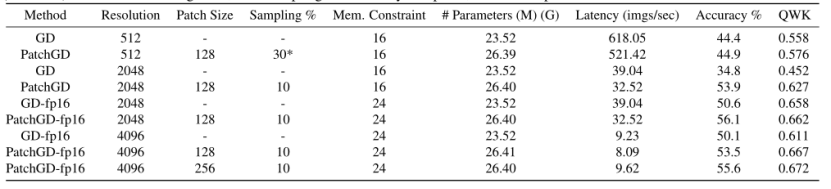
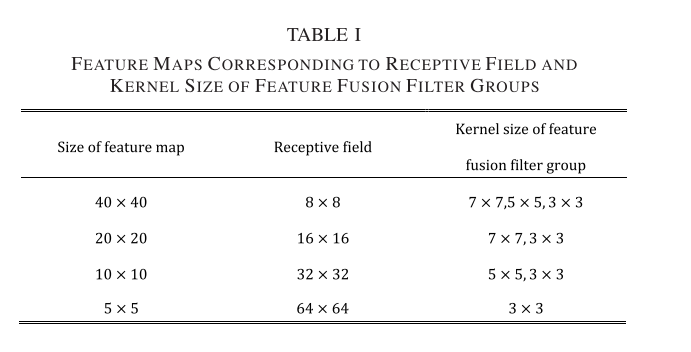
对应于特征融合滤波器组的感受野和核大小的特征图在表I中给出。
V. CONCLUSION
为了预防铁路调车事故的发生,提出了一种基于DFF-Net的铁路交通目标实时检测系统。为了提高网络的精度和实时性,我们在DFF-Net中引入了两个新的部分:优先目标检测模块和目标检测模块。首先,在前对象检测模块生成用于下一模块的在前锚框。目标检测模块利用已有的锚盒作为输入,通过特征融合子模块丰富语义信息,从而实现目标的准确检测。

![[Android Studio]Android 数据存储-文件存储学习笔记-结合保存QQ账户与密码存储到指定文件中的演练](https://img-blog.csdnimg.cn/24b696d76d374a9992017e1625389592.gif)