4D毫米波目标检测信息丰富,可获得目标3维位置信息、径向速度vr和rcs等,能够对目标准确分类。
4D毫米波和激光做好时空同步,可以用激光目标给4D毫米波做标注,提升标注效率。
1 激光用做4D毫米波分类真值
128线激光推理的结果作为4D毫米波雷达的真值,但不同类别的尺寸存在重叠,存在分类错误可能。
1.1 小车,类别0,点数0~70,长度2m~7m,宽度1.6m~2.7m

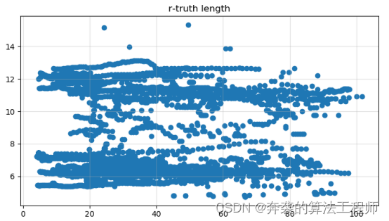
1.2 大车,类别1,点数0~120,长度4.5m~14m,宽度1.9m~3.3m

1.3 两轮车,类别4,点数0~24,长度1.4m~2.4m,宽度0.55m~1.1m

1.4 行人,类别5,点数0~14,长度0.5m~1.5m,宽度0.55m~0.9m

总体来看,128线激光标注的真值可靠性较高,但仍存在一些小问题,会对4D雷达分类结果造成一定影响,如果要求更高的标注准确度和精度,则需要提升128线激光雷达目标检测的性能,或者人工辅助标注。
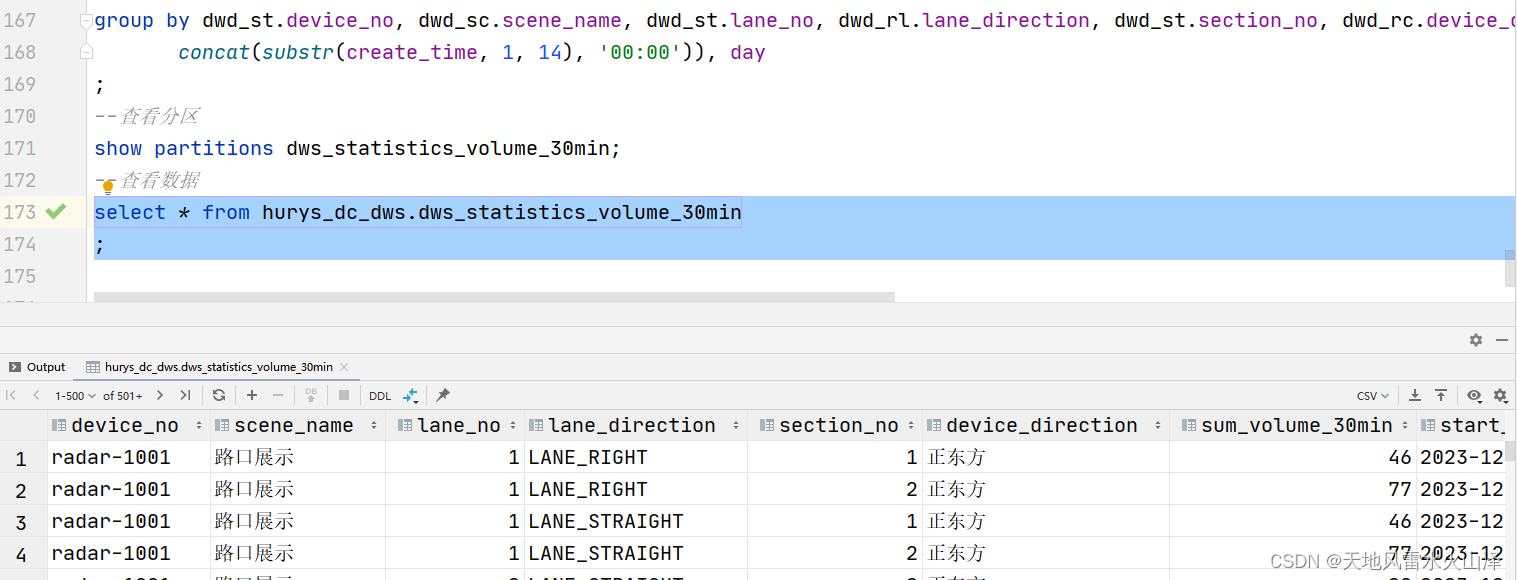
2 特征统计和分类验证
对标注数据进行统计分析,部分统计结果如下:
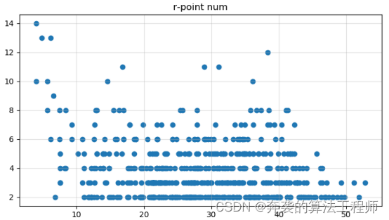
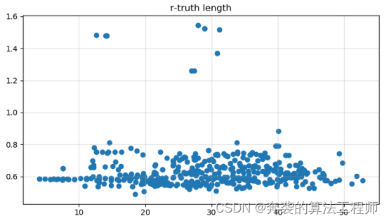
2.1 行人特征
2.2 两轮车特征
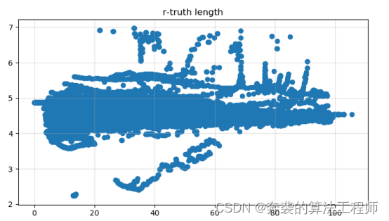
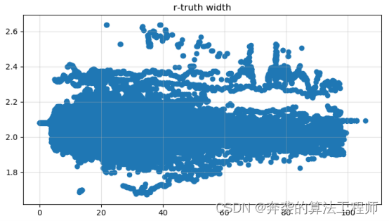
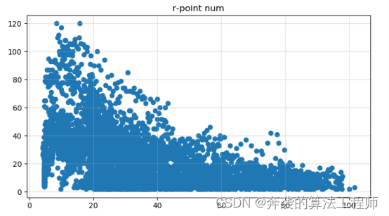
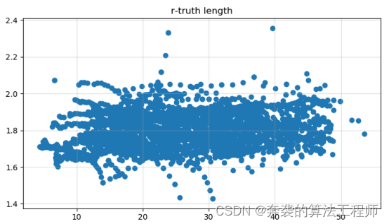
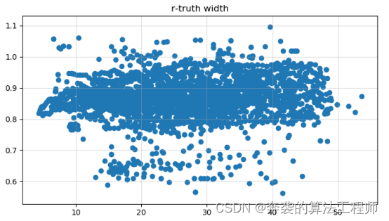
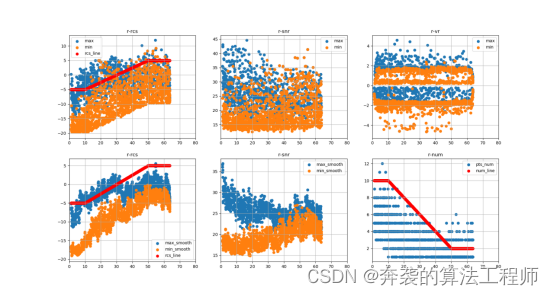
2.3 运动小汽车特征
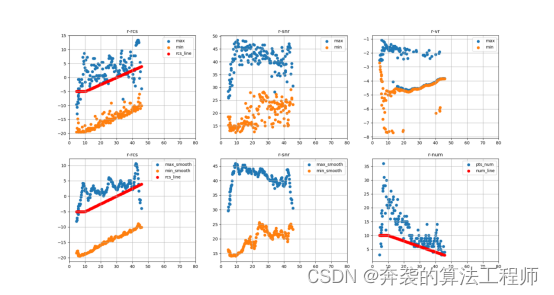
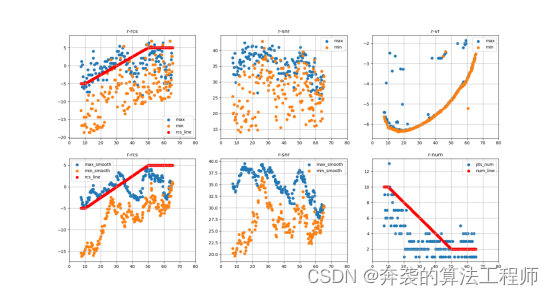
2.4 运动大巴特征
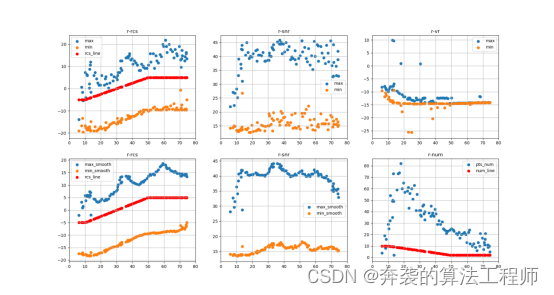
从统计结果可以发现,不同目标的特征有明显差异,比如点云数量、RCS等,通过对这些特征数据的训练,则能对毫米波目标进行分类。
实验使用了距离、朝向、点云数、最大rcs、最大snr做训练,使用了9000多组数据,80%用做训练集,20%用做测试集,验证两轮车和一般车辆的分类准确率。
总共使用了3种机器学习方法,最近邻(KNN)、支持向量机(SVM)和决策树(Decision Tree),分类准确率均在95%以上。
3 决策树用作4D毫米波分类的实现方法
使用4D毫米波雷达的一些特征,可以对其做准确的分类。这里使用点数、距离、方位角、长、宽作为特征,长宽通过估计目标朝向后将点云投影到朝向方向上计算得到。本文使用决策树算法来实现分类,下面是详细的实现过程。
训练使用python的sklearn,直接导入即可。
from sklearn.tree import DecisionTreeClassifier这里使用了三个类别(小车、大车、自行车)8万多组数据,80%用做训练集,20%用做测试集。
from sklearn.model_selection import train_test_split
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size = 0.2)然后调用函数进行训练。
decision_tree = DecisionTreeClassifier()
decision_tree.fit(X_train, y_train)训练完成后在测试集上验证。
y_train_pred = decision_tree.predict(X_train)
y_test_pred = decision_tree.predict(X_test)再验证准确率。
from sklearn.metrics import accuracy_score
print('decision tree train accurary socre:', accuracy_score(y_train, y_train_pred), 'test accurary socre:', accuracy_score(y_test, y_test_pred))
train_error_score = 1 - accuracy_score(y_train, y_train_pred)
test_error_score = 1 - accuracy_score(y_test, y_test_pred)
print('decision tree train error socre:', train_error_score, 'test error socre:', test_error_score)如果使用默认参数,则训练集准确率为100%,测试集准确率为95%。
![]()
获取决策树深度,发现有33层,叶子数有2179个,实在过于庞大。
tree_depth = decision_tree.get_depth()
tree_leaves = decision_tree.get_n_leaves()
print('depth',tree_depth,',leaves:',tree_leaves)调用决策树可视化工具,可以看到结果,由于叶子树太多,全屏显示只能看到一个个小点。

将其放大到100%才能看清细节。
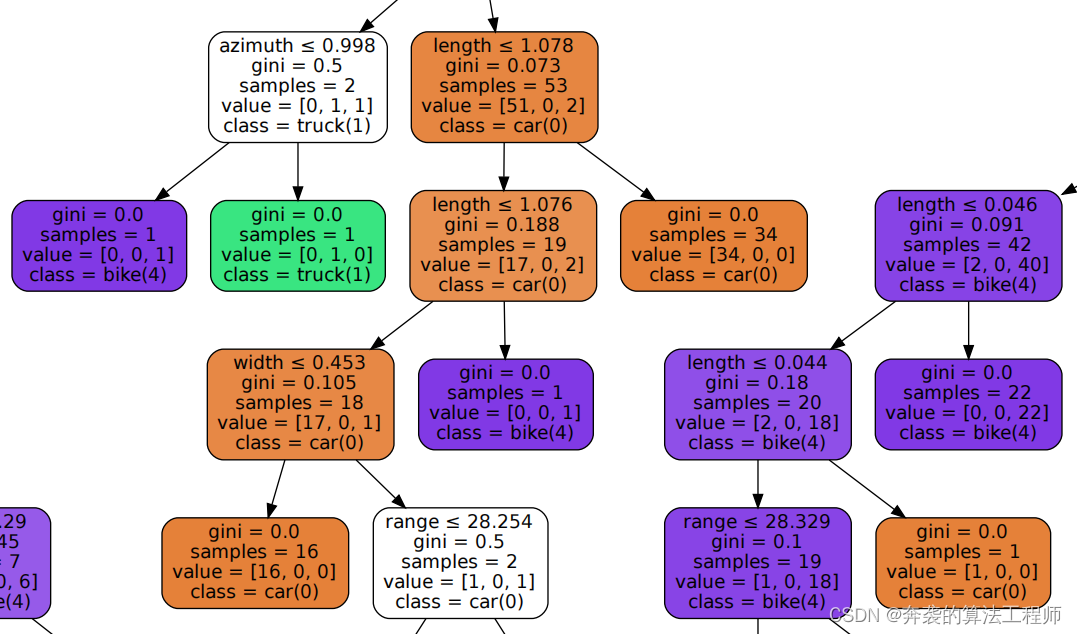
这么多的层数和叶子树存在过拟合风险,而且实现的代码也非常复杂,因此考虑降低层数。
decision_tree = DecisionTreeClassifier(max_depth=9) 在生成决策树模型的时候设置最大深度为9,则最后生成的决策树体量大幅减小,实测结果层数为9,叶子树为230。

训练集准确度有所降低,但测试集反而提升,表明降低了过拟合,提升了泛化性能。
![]()
模型生成之后,代码编写费事费力,这里参考这位博主的方法,用代码自动生成。不过python脚本有点小问题,需要自行发现修改才能得到最后的结果。
使用Python训练好的决策树模型生成C++代码_class=versicolor-CSDN博客
使用m2cgen库也可以实现模型到c代码的转换, 详细信息可以查看m2cgen · PyPI
import m2cgen as m2c
code = m2c.export_to_c(decision_tree)
file = open('radar_tree_m2cgen_code.txt','w')
file.write(code)
file.close()最后得到可以运行的C语言代码。

如果对效果不满意,可以使用不同的特征组合进行对比实验,以获得期望的结果。