1.CoTAttention
论文地址:2107.12292.pdf (arxiv.org)
CoTAttention网络是一种用于多模态场景下的视觉问答(Visual Question Answering,VQA)任务的神经网络模型。它是在经典的注意力机制(Attention Mechanism)上进行了改进,能够自适应地对不同的视觉和语言输入进行注意力分配,从而更好地完成VQA任务。
CoTAttention网络中的“CoT”代表“Cross-modal Transformer”,即跨模态Transformer。在该网络中,视觉和语言输入分别被编码为一组特征向量,然后通过一个跨模态的Transformer模块进行交互和整合。在这个跨模态的Transformer模块中,Co-Attention机制被用来计算视觉和语言特征之间的交互注意力,从而实现更好的信息交换和整合。在计算机视觉和自然语言处理紧密结合的VQA任务中,CoTAttention网络取得了很好的效果。
新加坡国立大学的Qibin Hou等人提出了一种为轻量级网络设计的新的注意力机制,该机制将位置信息嵌入到了通道注意力中,称为coordinate attention
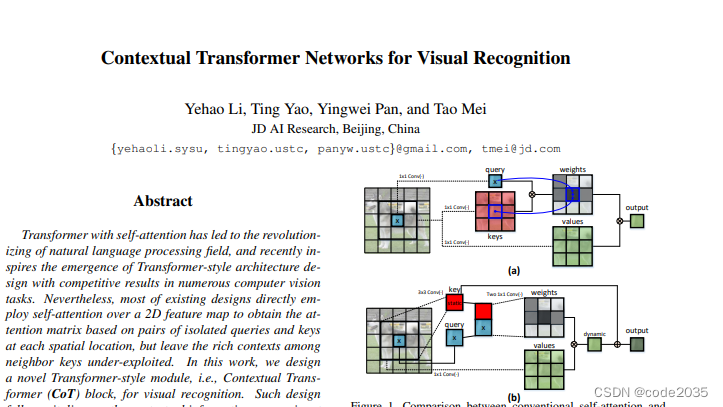
京东AI Research提出新的主干网络CoTNet,在CVPR上2021获得开放域图像识别竞赛冠军
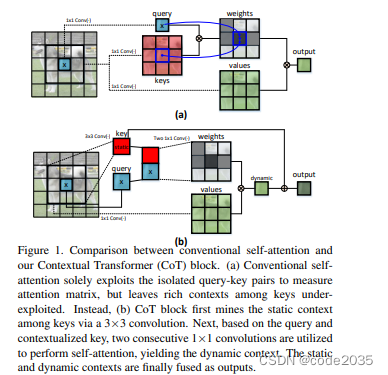
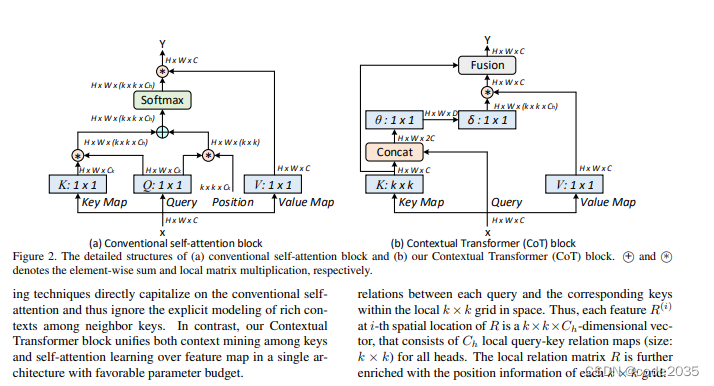
京东AI Research提出一种Contextual Transformer Networks结构,就是将Transformer捕捉全局信息的能力与CNN捕捉临近局部信息能力相结合,从而提高网络模型的特征表达能力。值得注意的是,该方法可以实现模块的“即插即用”,将ResNet网络中的3x3模块替换成CoTNet的核心模块即可使用,Res2Net网络也是基于这种思想实现的。
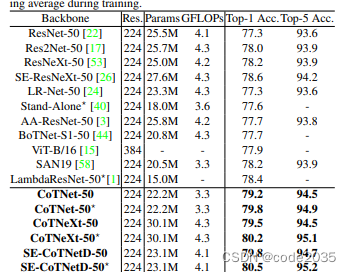
在相同深度(50层或101层)下,top-1和top-5结果都表明本文的方法比卷积网络和Attention-based网络性能更好。
2. 基于Yolov8的CoordAttention实现
2.1 CoTAttention 加入 modules.py中
核心代码:
###################### CoTAttention #### start by AI&CV ###############################
import torch
from torch import flatten, nn
from torch.nn import functional as F
class CoTAttention(nn.Module):
def __init__(self, dim=512, kernel_size=3):
super().__init__()
self.dim = dim
self.kernel_size = kernel_size
self.key_embed = nn.Sequential(
nn.Conv2d(dim, dim, kernel_size=kernel_size, padding=kernel_size // 2, groups=4, bias=False),
nn.BatchNorm2d(dim),
nn.ReLU()
)
self.value_embed = nn.Sequential(
nn.Conv2d(dim, dim, 1, bias=False),
nn.BatchNorm2d(dim)
)
factor = 4
self.attention_embed = nn.Sequential(
nn.Conv2d(2 * dim, 2 * dim // factor, 1, bias=False),
nn.BatchNorm2d(2 * dim // factor),
nn.ReLU(),
nn.Conv2d(2 * dim // factor, kernel_size * kernel_size * dim, 1)
)
def forward(self, x):
bs, c, h, w = x.shape
k1 = self.key_embed(x) # bs,c,h,w
v = self.value_embed(x).view(bs, c, -1) # bs,c,h,w
y = torch.cat([k1, x], dim=1) # bs,2c,h,w
att = self.attention_embed(y) # bs,c*k*k,h,w
att = att.reshape(bs, c, self.kernel_size * self.kernel_size, h, w)
att = att.mean(2, keepdim=False).view(bs, c, -1) # bs,c,h*w
k2 = F.softmax(att, dim=-1) * v
k2 = k2.view(bs, c, h, w)
return k1 + k2
###################### CoTAttention #### end by AI&CV ###############################2.2 yolov8_CoTAttention.yaml
# Ultralytics YOLO , GPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 4 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 3, CoTAttention, [256]] # 16
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 19 (P4/16-medium)
- [-1, 3, CoTAttention, [512]]
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 23 (P5/32-large)
- [-1, 3, CoTAttention, [1024]]
- [[16, 20, 24], 1, Detect, [nc]] # Detect(P3, P4, P5)