Deformable ConvNets v2
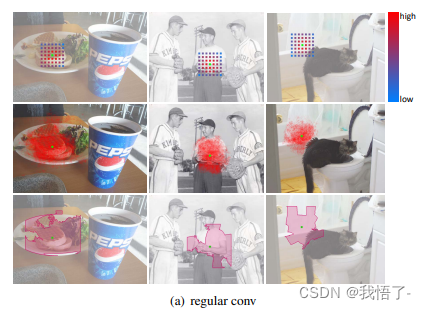
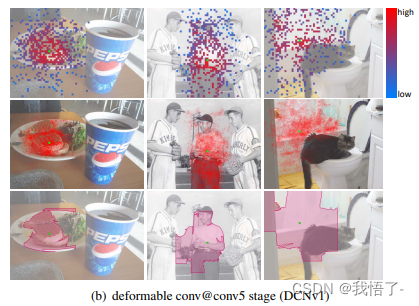
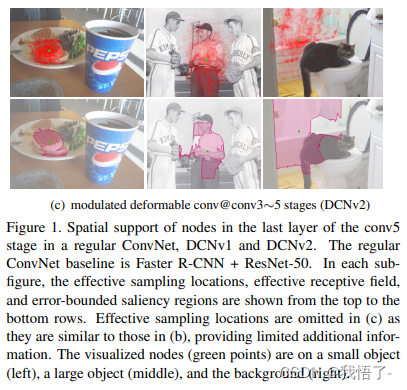
简介:由于构造卷积神经网络所用的模块中几何结构是固定的,其几何变换建模的能力本质上是有限的。在DCN v1中引入了两种新的模块来提高卷积神经网络对变换的建模能力,即可变形卷积 (deformable convolution) 和可变形兴趣区域池化 (deformable ROI pooling)。它们都是基于在模块中对空间采样的位置信息作进一步位移调整的想法,该位移可在目标任务中学习得到,并不需要额外的监督信号。新的模块可以很方便在现有的卷积神经网络 中取代它们的一般版本,并能很容易进行标准反向传播端到端的训练,从而得到可变形卷积网络 (deformable convolutional network)。但是增加偏移之后可能会将无关的信息考虑进去,影响最终的结果。所以在DCN v2中作者对DCN v1进行了提升,减小无关信息的干扰。
原文地址:Deformable ConvNets v2: More Deformable, Better Results
pytorch_9">pytorch代码实现
class DCNv2(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride=1,
padding=1, dilation=1, groups=1, deformable_groups=1):
super(DCNv2, self).__init__()
self.in_channels = in_channels
self.out_channels = out_channels
self.kernel_size = (kernel_size, kernel_size)
self.stride = (stride, stride)
self.padding = (padding, padding)
self.dilation = (dilation, dilation)
self.groups = groups
self.deformable_groups = deformable_groups
self.weight = nn.Parameter(
torch.empty(out_channels, in_channels, *self.kernel_size)
)
self.bias = nn.Parameter(torch.empty(out_channels))
out_channels_offset_mask = (self.deformable_groups * 3 *
self.kernel_size[0] * self.kernel_size[1])
self.conv_offset_mask = nn.Conv2d(
self.in_channels,
out_channels_offset_mask,
kernel_size=self.kernel_size,
stride=self.stride,
padding=self.padding,
bias=True,
)
self.bn = nn.BatchNorm2d(out_channels)
self.act = Conv.default_act
self.reset_parameters()
def forward(self, x):
offset_mask = self.conv_offset_mask(x)
o1, o2, mask = torch.chunk(offset_mask, 3, dim=1)
offset = torch.cat((o1, o2), dim=1)
mask = torch.sigmoid(mask)
x = torch.ops.torchvision.deform_conv2d(
x,
self.weight,
offset,
mask,
self.bias,
self.stride[0], self.stride[1],
self.padding[0], self.padding[1],
self.dilation[0], self.dilation[1],
self.groups,
self.deformable_groups,
True
)
x = self.bn(x)
x = self.act(x)
return x
def reset_parameters(self):
n = self.in_channels
for k in self.kernel_size:
n *= k
std = 1. / math.sqrt(n)
self.weight.data.uniform_(-std, std)
self.bias.data.zero_()
self.conv_offset_mask.weight.data.zero_()
self.conv_offset_mask.bias.data.zero_()
class Bottleneck_DCN(nn.Module):
# Standard bottleneck with DCN
def __init__(self, c1, c2, shortcut=True, g=1, k=(3, 3), e=0.5): # ch_in, ch_out, shortcut, groups, kernels, expand
super().__init__()
c_ = int(c2 * e) # hidden channels
if k[0] == 3:
self.cv1 = DCNv2(c1, c_, k[0], 1)
else:
self.cv1 = Conv(c1, c_, k[0], 1)
if k[1] == 3:
self.cv2 = DCNv2(c_, c2, k[1], 1, groups=g)
else:
self.cv2 = Conv(c_, c2, k[1], 1, g=g)
self.add = shortcut and c1 == c2
def forward(self, x):
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
class C2f_DCN(nn.Module):
# CSP Bottleneck with 2 convolutions
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
self.c = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)
self.m = nn.ModuleList(Bottleneck_DCN(self.c, self.c, shortcut, g, k=(3, 3), e=1.0) for _ in range(n))
def forward(self, x):
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
具体修改
module.py文件修改
将pytorch代码实现中的定义代码添加至module.py文件最后
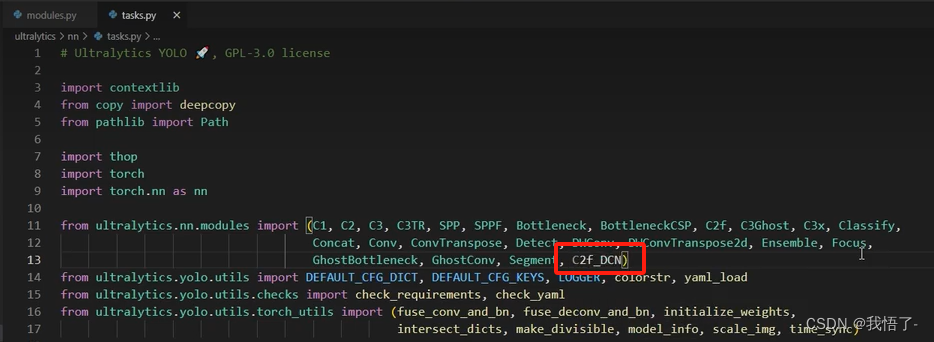
task.py文件修改
导入C2f-DCN模块
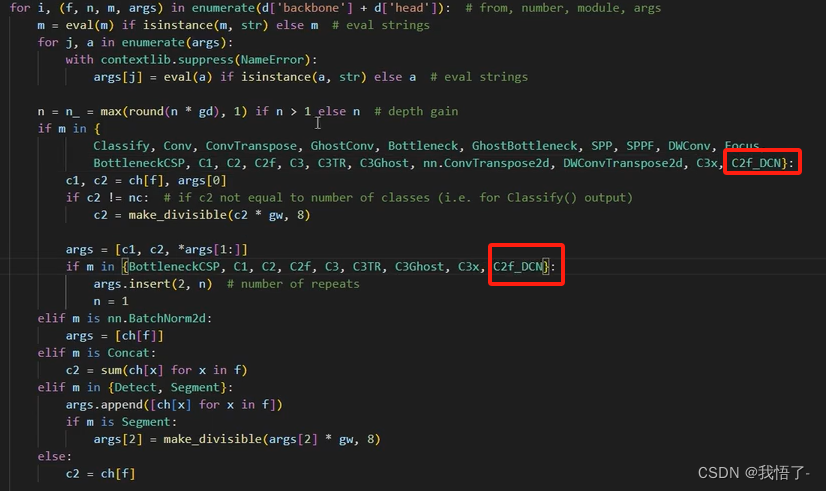
def parse_model函数部分导入C2f-DCN
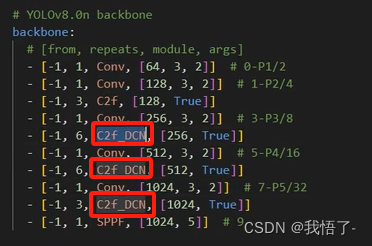
yolov8.yaml配置文件修改
替换原有C2f模块,最后进行训练即可。