Deformable DETR(2020 ICLR)
detr训练epochs缩小十倍,小目标性能更好
Deformable attention
-
结合变形卷积的稀疏空间采样和Transformer的关系建模能力
-
使用多层级特征层特征,不需要使用FPN的设计(直接使用backbone多层级输出)
两种提升方法:
- bbox迭代细化机制
- 2.两阶段Deformable DETR
整体结构:
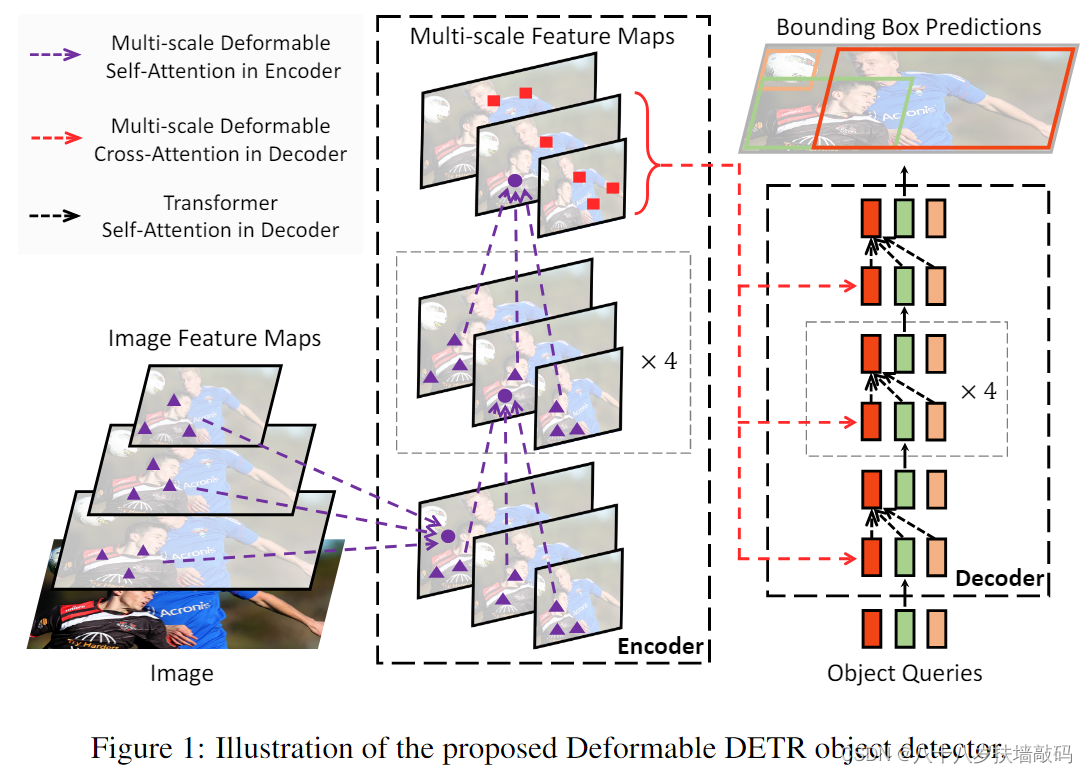
同样是6encoder,6decoder。
首先,运用了多层的图像特征,在一个采样点周围进行多层级的可变形注意力模块(紫色部分)
decoder用交叉注意力,红色的线指向第二个(cross,第一个是selfattention)
object query一样
详细展示
multihead-attention:
MultiHeadAttn
(
z
q
,
x
)
=
∑
m
=
1
M
W
m
⏟
\
R
C
×
C
v
[
∑
k
∈
Ω
k
A
m
q
k
W
m
′
⏟
\
R
C
v
×
C
x
k
]
where
A
m
q
k
∝
exp
{
(
U
m
z
q
)
T
(
V
m
x
k
)
C
v
}
U
m
,
V
m
∈
\
R
C
p
×
C
\begin{array}{c} \text { MultiHeadAttn }\left(\mathrm{z}_{\mathrm{q}}, \mathrm{x}\right)=\sum_{m=1}^{M} \underbrace{W_{m}}_{\backslash \mathrm{R}^{C \times C_{v}}}[\sum_{k \in \Omega_{k}} A_{m q k} \underbrace{W_{m}^{\prime}}_{\backslash \mathrm{R}^{C_{v} \times C}} x_{k}] \\ \text { where } A_{m q k} \propto \exp \left\{\frac{\left(U_{m} z_{q}\right)^{T}\left(V_{m} x_{k}\right)}{\sqrt{C_{v}}}\right\} \quad U_{m}, V_{m} \in \backslash \mathbf{R}^{C_{p} \times C} \end{array}
MultiHeadAttn (zq,x)=∑m=1M\RC×Cv
Wm[∑k∈ΩkAmqk\RCv×C
Wm′xk] where Amqk∝exp{Cv(Umzq)T(Vmxk)}Um,Vm∈\RCp×C
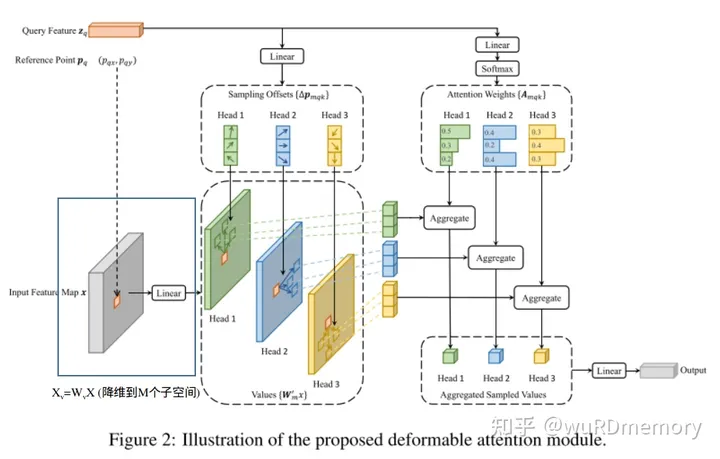
deformable-attention:
DeformAttn
(
z
q
,
p
q
,
x
)
=
∑
m
=
1
M
W
m
⏟
\
R
C
×
C
v
[
∑
k
=
1
K
A
m
q
k
W
m
′
⏟
\
R
C
v
×
C
x
(
p
q
+
Δ
p
m
q
k
)
]
\operatorname{DeformAttn}\left(\mathrm{z}_{\mathrm{q}}, \mathrm{p}_{\mathrm{q}}, \mathrm{x}\right)=\sum_{m=1}^{M} \underbrace{W_{m}}_{\backslash \mathrm{R}^{C \times C v}}[\sum_{k=1}^{K} A_{m q k} \underbrace{W_{m}^{\prime}}_{\backslash \mathrm{R}^{C_{v} \times C}} x\left(p_{q}+\Delta p_{m q k}\right)]
DeformAttn(zq,pq,x)=m=1∑M\RC×Cv
Wm[k=1∑KAmqk\RCv×C
Wm′x(pq+Δpmqk)]
M:head
K:采样点
特征图:xl,l∈[1,L],表示多个尺度的特征图
p_q:参考点,query的坐标点
这里每个像素点z_q只和其对应的k个采样点算attention
- z_q:query可以是encoder的图像或上一个decoder的输出(特征图中每个像素点都是一个维度为C的向量z_q)
- 每个像素点的Reference Point也就是二维位置坐标为 p_q(在图像上生成很多采样点p_q,文章最后写了如何在encoder和decoder处获得reference point)。
- M代表多头注意力机制中头的数目(论文中M=8)
- 每一个头中只考虑 z_q 附近 K 个点(K远小于H x W,论文K=4)。
- Δpmqk代表采样的位置偏移量(第一个linear),是一个二维的坐标(初始化采样点是固定的,但后续将通过全连接层计算预测更加值得关注的点的坐标)
K 个采样点由参考点 p_q和偏移量 Δpmqk共同得到,当然这个偏移量不可能就是一个整数,这里获取该偏移量上的特征时是使用了双线性插值的;
之后再接通过权重norm,输出。
Deformable Attention使用的地方:
- Encoder中的Self-Attention使用Deformable Attention替换.
- Decoder中的Cross-Attention使用Deformable Attention替换,selfattention没替换,关注的还是原始的qkv
原始DETR:分类头,bbox预测头输出四个值(中心点和宽高)
deformable detr:bbox的预测头的预测结果是相对于参考点的坐标偏移量,这样的设计可以降低优化难度网络
首先会经过Linear得出参考点的初始坐标,因此最后的bbox的输出不再是表示坐标值,而是表示了坐标的偏移量,用以对参考点的坐标进行修正,这样也更加符合网络的设计

deformable detr几个变体:
变体1:bbox强化 bbox refinement(不是辅助分类)
reference point:encoder:gird H*W
decoder:经过linear后生成的300个坐标( 参考点的获取方法为object queries通过一个nn.Linear得到每个对应的reference point)
不适用bbox强化,decoder连续作用
使用:
过一个decoder,算一次bbox坐标(加上reference point),传入下一层,反复
变体2:two-stage
6encoder -> memory(output)-> 传入两个FFN分类头(cls,bbox) -> bbox输出 和memory-> 6decoder
其他:
num_class没有no object(+1),但是有类似的处理过程
matcher的label loss计算不同:
原始:直接过softmax
这里用的是focal bce loss
参考:
um_class没有no object(+1),但是有类似的处理过程
matcher的label loss计算不同:
原始:直接过softmax
这里用的是focal bce loss
参考:
https://www.bilibili.com/video/BV1B8411M73e/?spm_id_from=333.788&vd_source=4e2df178682eb78a7ad1cc398e6e154d