文章目录
- 一、目标检测介绍
- 二、YOLOX介绍
- 三、源码获取
- 四、环境搭建
- 4.1 环境检测
- 五、数据集准备
- 六、模型训练
- 七、模型验证
- 八、模型测试
一、目标检测介绍
目标检测(Object Detection)是计算机视觉领域的一项重要技术,旨在识别图像或视频中的特定目标并确定其位置。通过训练深度学习模型,如卷积神经网络(CNN),可以实现对各种目标的精确检测。常见的目标检测任务包括:人脸检测、行人检测、车辆检测等。目标检测在安防监控、自动驾驶、智能零售等领域具有广泛应用前景。
二、YOLOX介绍
论文链接:YOLOX: Exceeding YOLO Series in 2021
背景:随着物体检测的发展,YOLO系列始终追求实时应用的最佳速度和精度权衡。而且在过去两年中,目标检测学术界的主要进展都集中在无锚检测器 、高级标签分配策略 和端到端(无 NMS)检测器。而YOLOV4和YOLOV5仍然是基于锚的检测器。由于计算资源的限制导致这些优秀的检测器并不能广泛运用。
创新与贡献:
- Backbone。使用的依旧是CSP的思想,不过YOLOv5中的C3模块被替换成了C2f模块,实现了进一步的轻量化,同时YOLOv8依旧使用了YOLOv5等架构中使用的SPPF模块;
- PAN-FPN。毫无疑问YOLOv8依旧使用了PAN的思想,不过通过对比YOLOv5与YOLOv8的结构图可以看到,YOLOv8将YOLOv5中PAN-FPN上采样阶段中的卷积结构删除了,同时也将C3模块替换为了C2f模块
- Decoupled-Head。是不是嗅到了不一样的味道?是的,YOLOv8走向了Decoupled-Head;
- Anchor-Free。YOLOv8抛弃了以往的Anchor-Base,使用了Anchor-Free的思想;
- 损失函数。YOLOv8使用VFL Loss作为分类损失,使用DFL Loss+CIOU Loss作为分类损失;
- 样本匹配。YOLOv8抛弃了以往的IOU匹配或者单边比例的分配方式,而是使用了Task-Aligned Assigner匹配方式
三、源码获取
- 源码:点击
- bubbliiiing的代码:点击
四、环境搭建
我这里的环境安装的方式是根据源码安装的,但是我的代码是下载的bubbliiiing的。
第一步:Install YOLOX from source
cd YOLOX
pip install -v -e . # or python setup.py develop
第二步:安装cuda、torch、torchvision重要的环境。参考这个博客
| 环境 | 版本 |
|---|---|
| python | 3.7.11 |
| cuda | 10.1 |
| torch | 1.8.0+cu101 |
| torchvision | 0.9.0+cu101 |
第三步:安装之后进入到此环境下的代码主目录,在终端运行
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple/
4.1 环境检测
下载YOLOX-S:点击

下载之后将模型放在下图位置,并修改predict.py路径
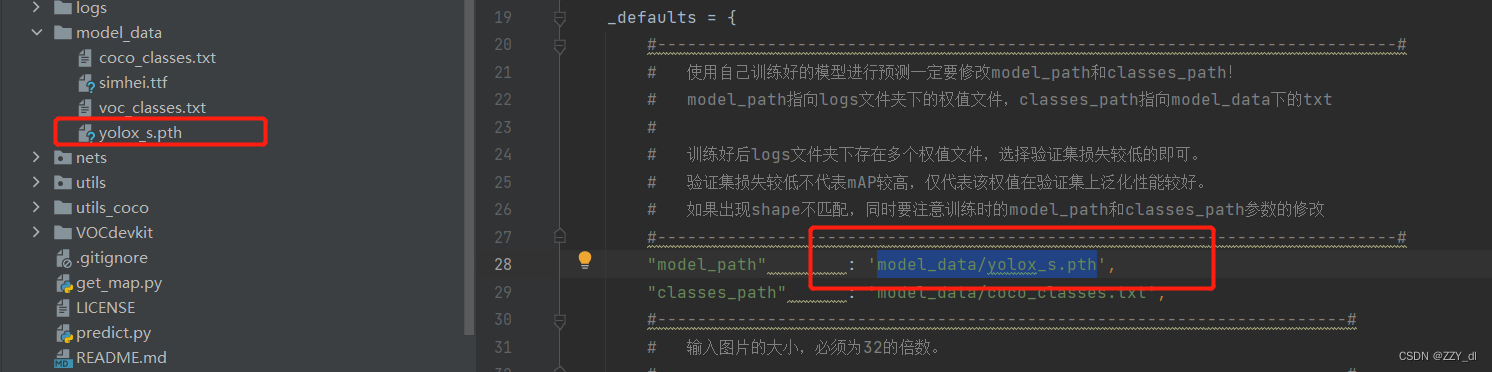
然后运行predict.py即可,输入图片路径,将得到下面的结果。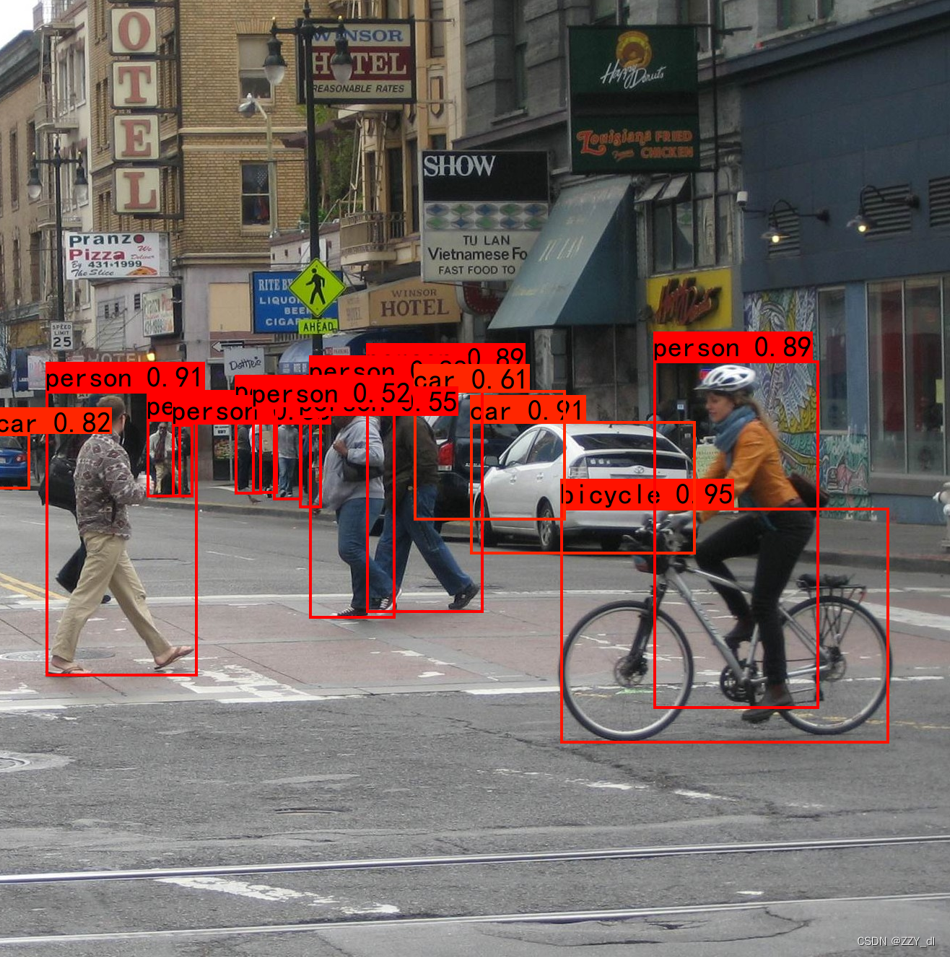
五、数据集准备
通过labelImg标注图片得到xml和原图,分别放置在这两个文件夹下(labelImg的使用可查看这个博客)
这时候就需要将此数据集转换成VOC格式的数据集,方可训练。
通过voc_annotation.py来将数据集进行划分,注意几个地方:
- annotation_mode为0/1/2的时候的区别,代码里面有备注
- classes_path:数据集的类别情况,要改为自己的类别
- 其他地方就是修改路径的问题,改成自己数据集对应的路径
运行后发现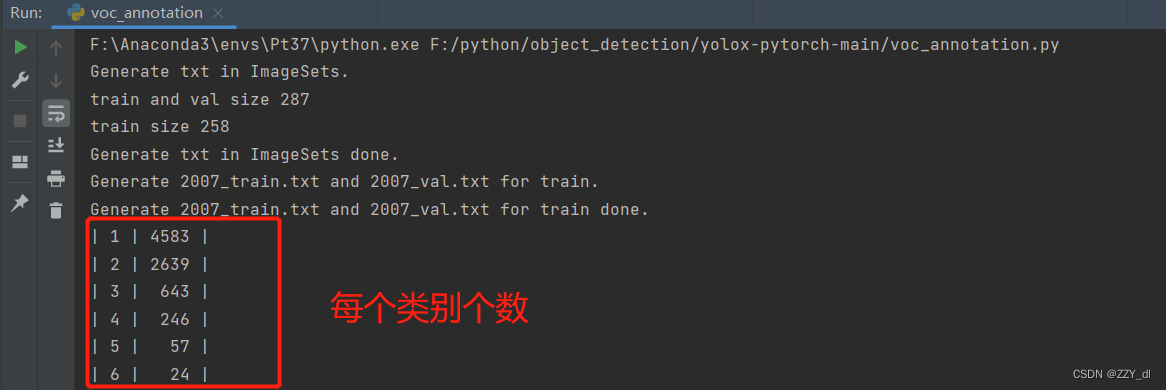
六、模型训练
这时候你会发现在主目录下会得到两个txt文件,一个用于训练一个用于验证。
然后你运行train.py,model_path修改为自己的类别文件路径。然后就可以运行。
python train.py

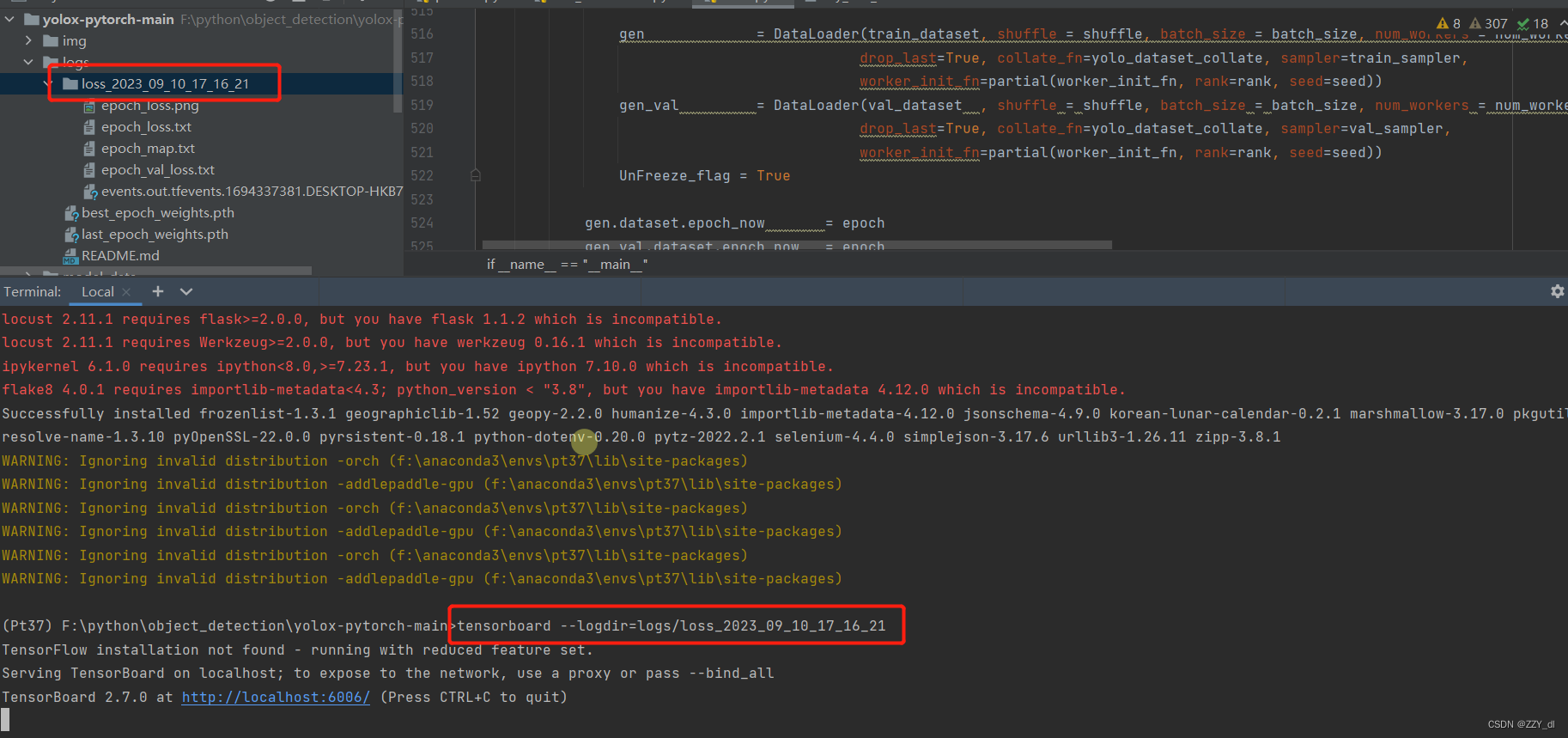
训练的同时我们也可以通过tensorboard来查看训练损失和其他指标的图

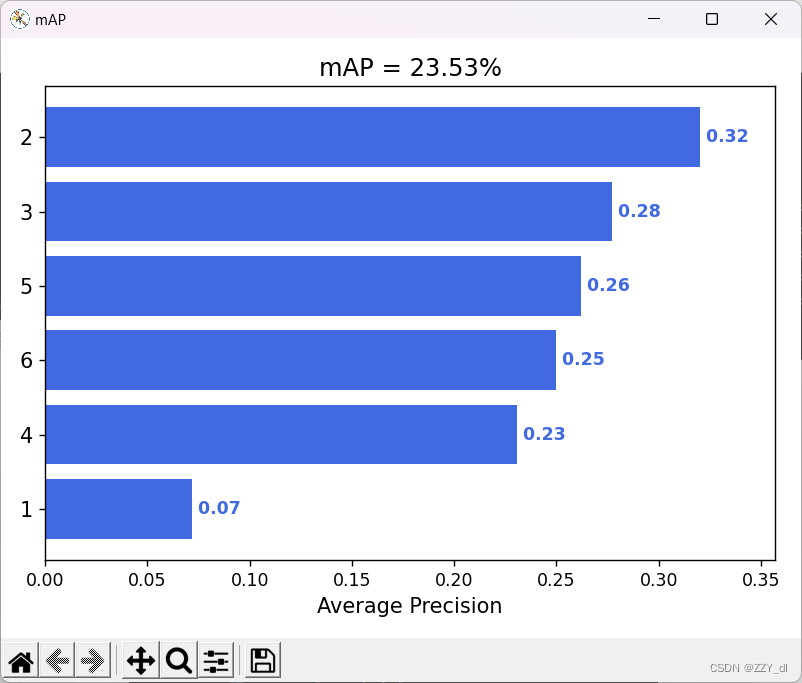
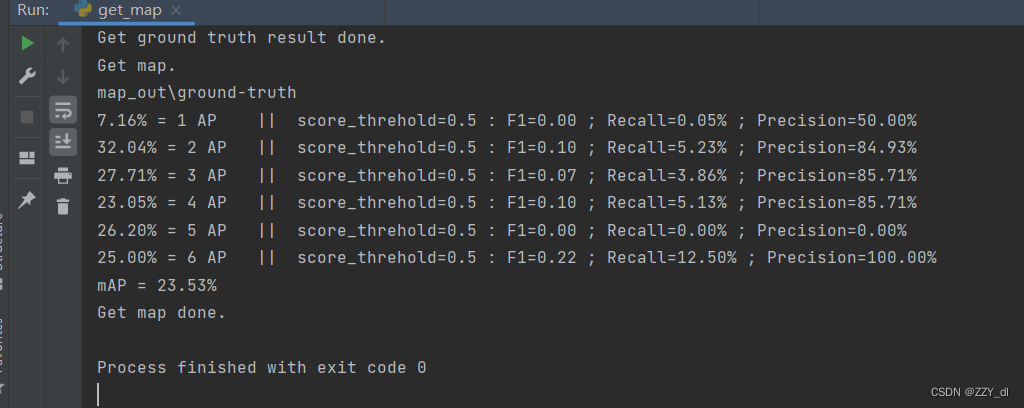
七、模型验证
通过get_map.py来验证模型的准确率、召回率、F1和mAP。(若想要测试集多点,需通过voc_annotation.py来划分数据集的测试集)
python get_map.py
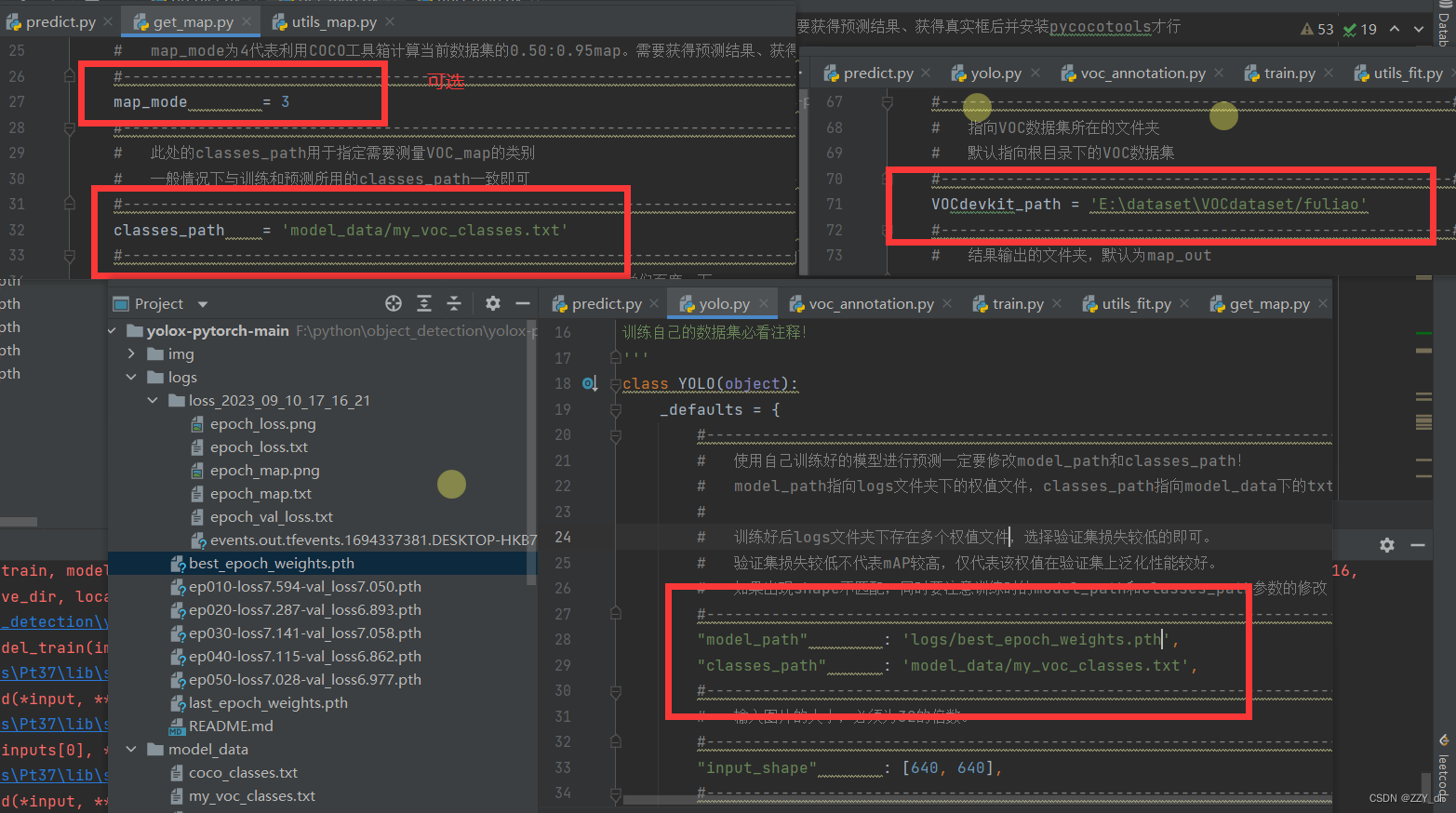
修改的地方:
- map_mode:第一次使用需要设置为0
- classes_path:为自己的类别文件路径
- VOCdevkit_path:为自己的数据集路径
- 还有其他的相关路径的修改
第一次必须使用map_mode = 0才能运行。因为后面有些模式需要结合检测的结果来进行绘制,
由于训练时间问题,我只是简单测试了一下训练效果,没有进行大量的epoch训练,所以效果并不是很好。
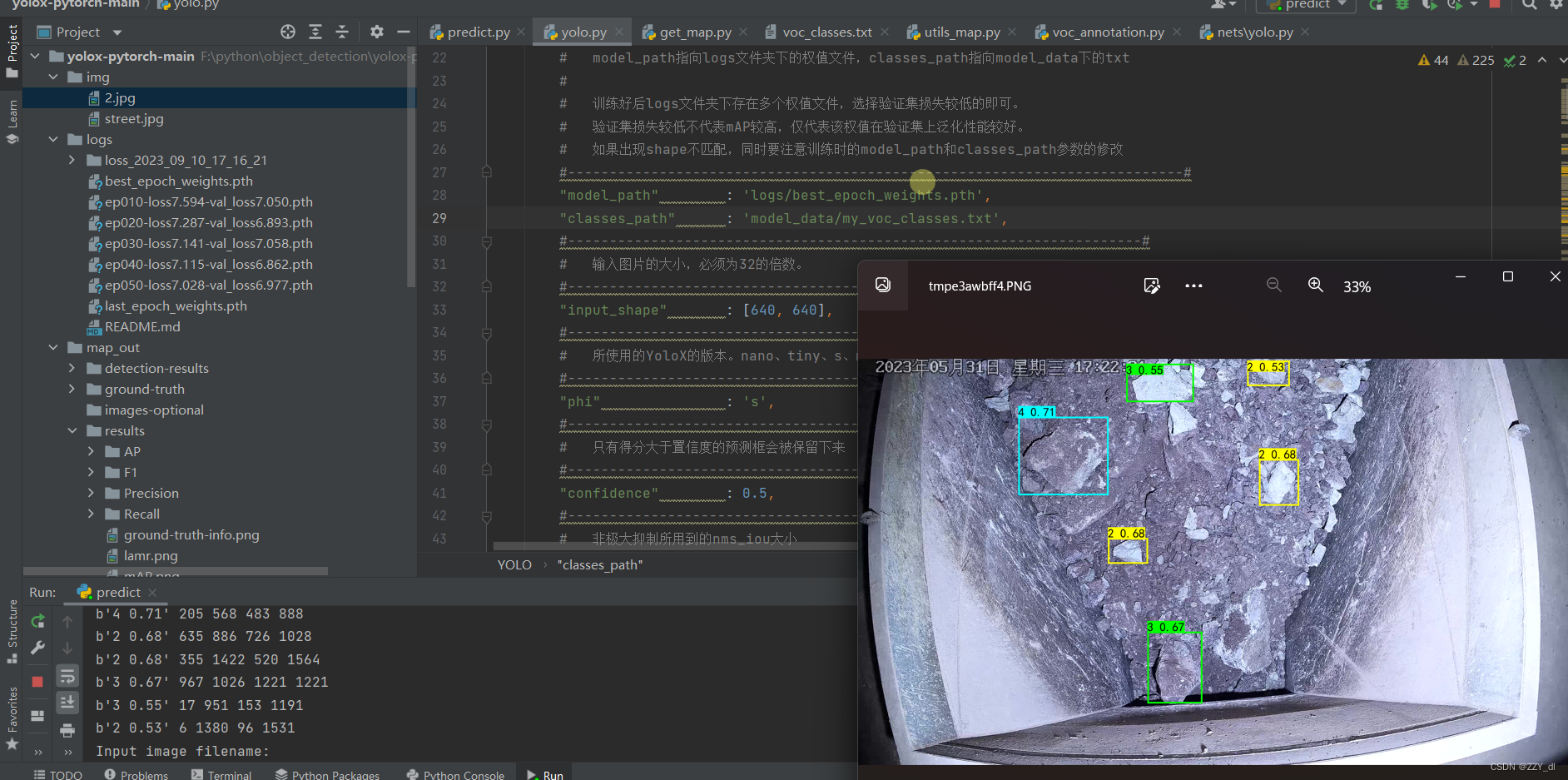
八、模型测试
通过predict.py来对模型测试。
修改的地方:
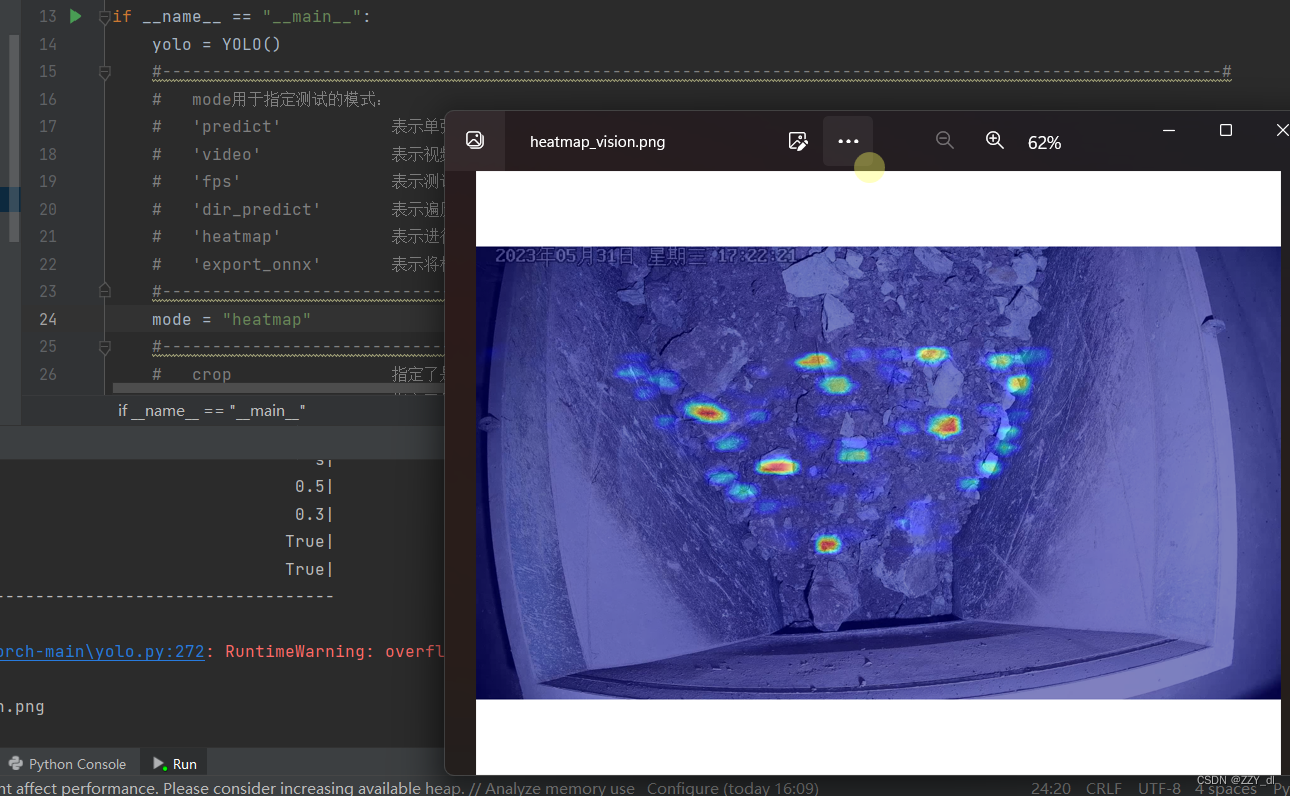
- mode:可选择图片、视频、fps、热力图、转换成onnx模型等
- 还有model_path和classes_path也需要改为自己的(和训练情况一样,model_path为训练好的模型文件)
单张图片
热力图