回归
信息安全
maven
递归
st-link
gcc
langchain
短视频
ci/cd
CalBioreagents
断裂力学
SMBIOS
log4j
matlab入门教程
运动场地预约
fiddler
EDI
windterm
数据探索
黄河流域
目标检测YOLO实战应用案例100讲-基于偏振图像的水下动目标检测(续)
相关文章
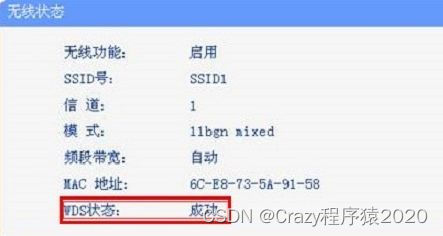
两个路由器如何连接设置的方法攻略
一、前言 随着智能家居时代来临,家里的网络部署需求开始复杂起来。往往一个路由器已经不能满足需求或者不利于拓展。两个路由器连接最常见的情况是家中已有一个路由器,并且已经通过这个路由器来正常上网。现在是因某些原因想在不改变已经在用的路由器的设…
Pytorch从零开始实战01
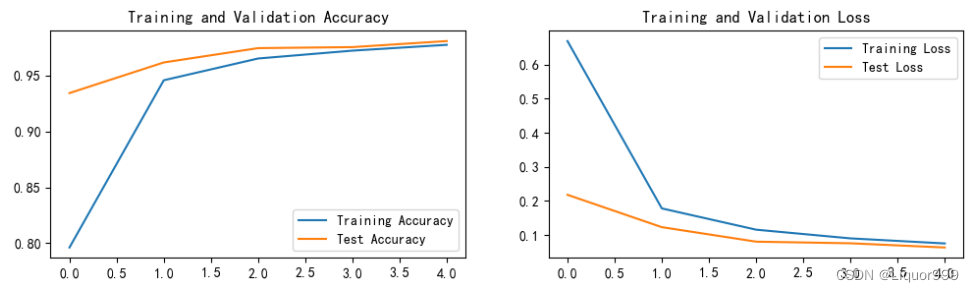
Pytorch从零开始实战——MNIST手写数字识别 文章目录 Pytorch从零开始实战——MNIST手写数字识别环境准备数据集模型选择模型训练可视化展示 环境准备
本系列基于Jupyter notebook,使用Python3.7.12,Pytorch1.7.0cu110,torchvision0.8.0&…

mysql场景题:最近7天连续3天登陆用户,字段,id,date(已去重)
1.最近7天连续3天登陆用户,字段,id,date(已去重)
思路: lag对时间开窗(注意时间得转换为时间戳(int类型才可以添加后续条件),跳行为2(连续3天&am…
K8S 基础概念学习
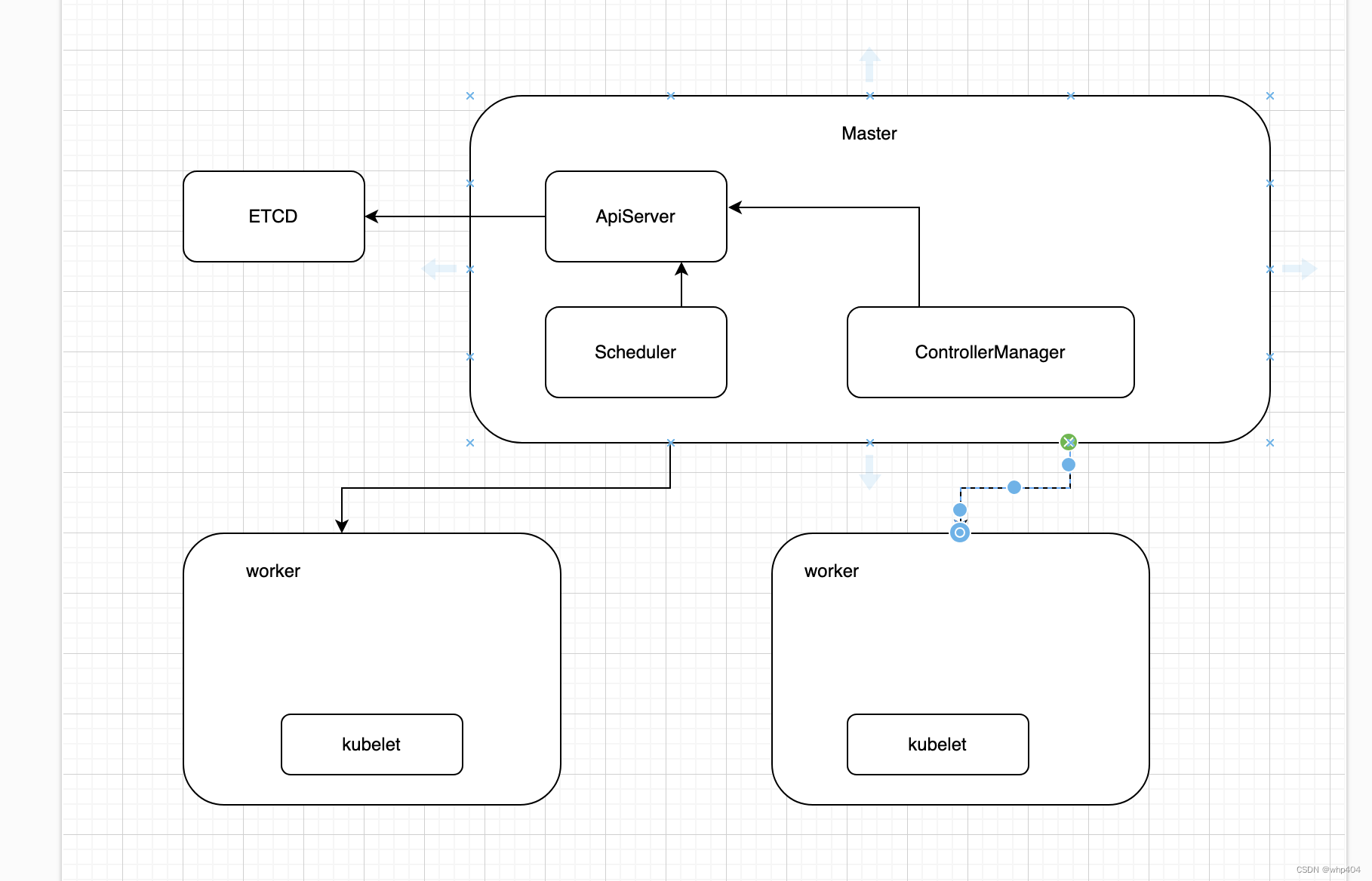
1.K8S 通过Deployment 实现滚动发布,比如左边的ReplicatSet 的 pod 中 是V1版本的镜像,Deployment通过 再启动一个 ReplicatSet 中启动 pod中 镜像就是V2
2.每个pod 中都有一个pause 容器,他会连接本pod中的其他容器,实现互通。p…

远距离WiFi模组方案,实现移动设备之间高效通信,无人机远程图传应用
随着科技的不断进步,无线通信技术也在日新月异地发展。其中,WiFi技术已经成为现代生活中不可或缺的一部分。
从室内到室外,WiFi的应用场景正在不断扩大,为我们的日常生活和工业生产带来了极大的便利。
WiFi技术,即无…
Programming abstractions in C阅读笔记:p144-p160
《Programming Abstractions In C》学习第56天,p144-p160。完成第三章内容学习,第三章总计54页(p107-p160),耗时10天,平均6页/天。
一、技术总结
第三章的内容主要介绍C语言中的库(library)和接口(interf…
Python3.11教程3:模块和包(pip/conda)、文件系统(os/ shutil/json/pickle/openpyxl/xlrd)
文章目录 七、模块和包7.1 模块7.1.1 模块搜索路径7.1.2 PYTHONPATH和sys.path7.1.2 模块的导入和常见错误7.1.3 模块的缓存机制7.1.4 __name__ 和 __main__ 函数 7.2 标准库7.3 包7.3.1 创建包7.3.2 导入包7.3.3 pip包管理器7.3.4 conda 7.4 如何组织和管理大型项目中的模块与…
【AIGC专题】Stable Diffusion 从入门到企业级应用0414
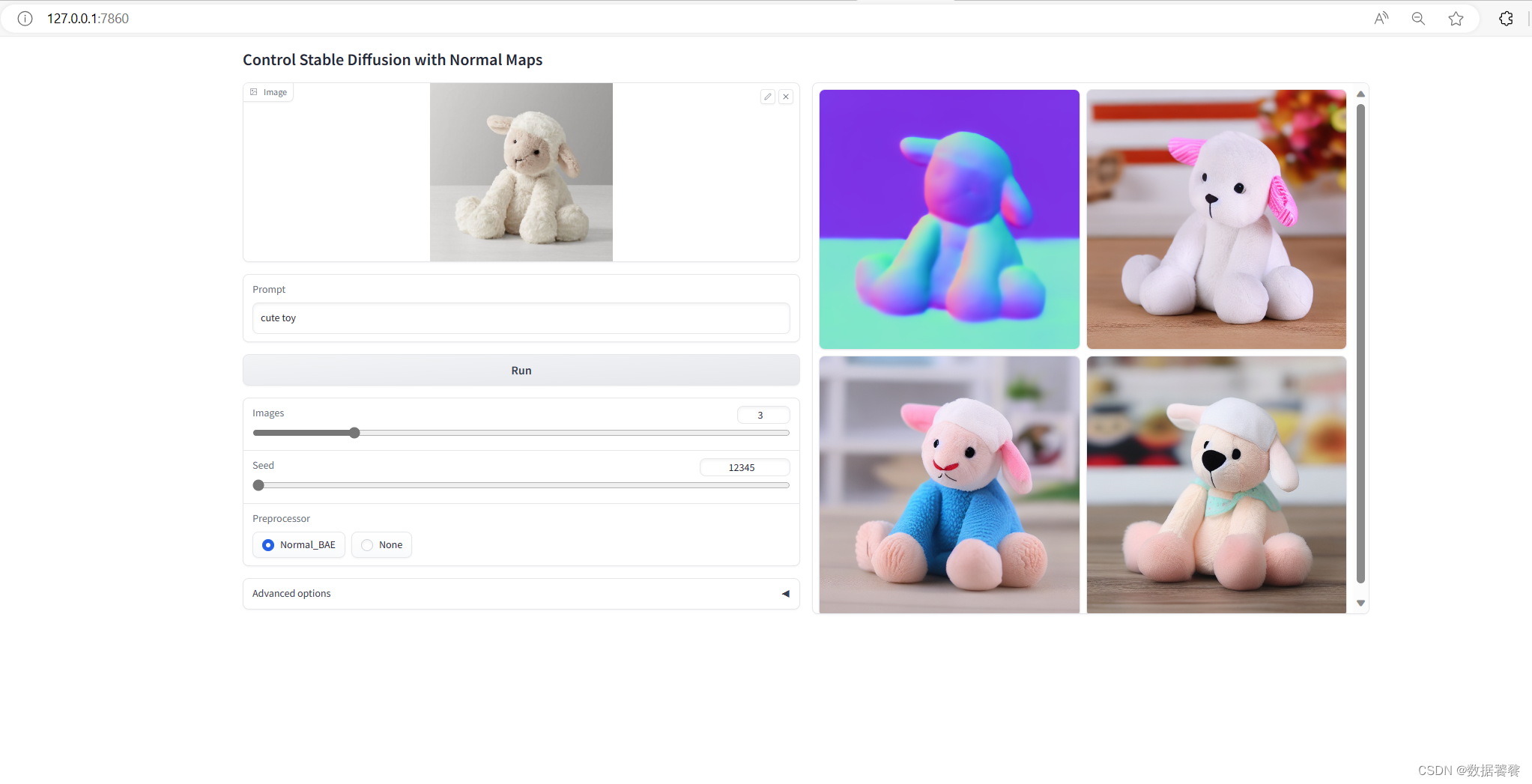
一、前言
本文是《Stable Diffusion 从入门到企业级应用实战》系列的第四部分能力进阶篇《Stable Diffusion ControlNet v1.1 图像精准控制》的第0414篇 利用Stable Diffusion ControlNet 法线贴图模型精准控制图像生成。本部分内容,位于整个Stable Diffusion生态体…