基于yolo系列的模型开发构建红外场景下的目标检测系统,在我之前的文章中已经有好几次实践了,感兴趣的话可以自行移步阅读:
《基于YOLO开发构建红外场景下无人机航拍车辆实例分割检测识别分析系统》
《红外场景下基于YOLO集成模型开发构建海洋目标检测识别分析系统》
《基于轻量级YOLOv5n/s/m三款模型开发构建基于无人机视角的高空红外目标检测识别分析系统,对比测试分析性能》
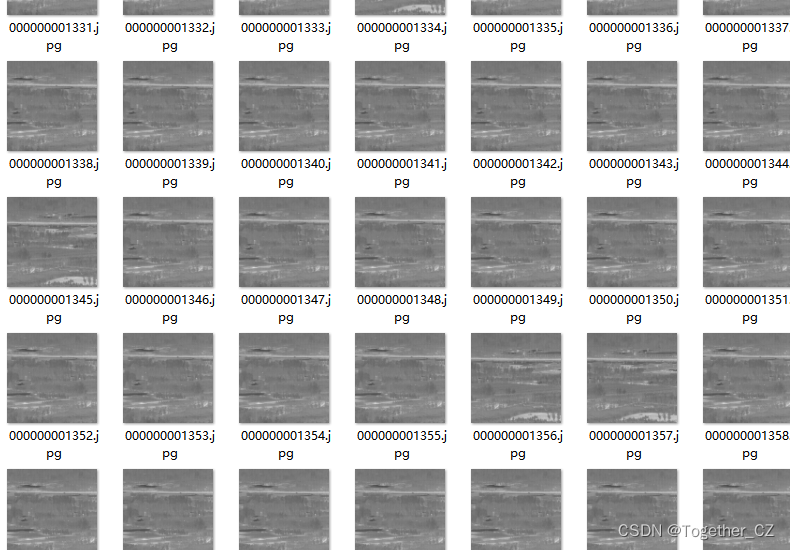
这些项目有共性就是红外场景下的目标相对可见,大小没有很小,而本文的红外目标虽然只有一类就是飞机,但是目标可见度很低,且尺度很小,更不易检测识别到。首先来看下实例效果:

接下来看下数据集:
YOLO格式数据标注文件如下:

这里是基于yolov7来开发构建模型的,如果不知道如何基于yolov7开发构建自己的个性化应用,可以参考我的超详细实战专栏文章,如下:
《YOLOv7基于自己的数据集从零构建模型完整训练、推理计算超详细教程》
这里就不再赘述了。
默认100次epoch的迭代计算,简单看下结果指标:

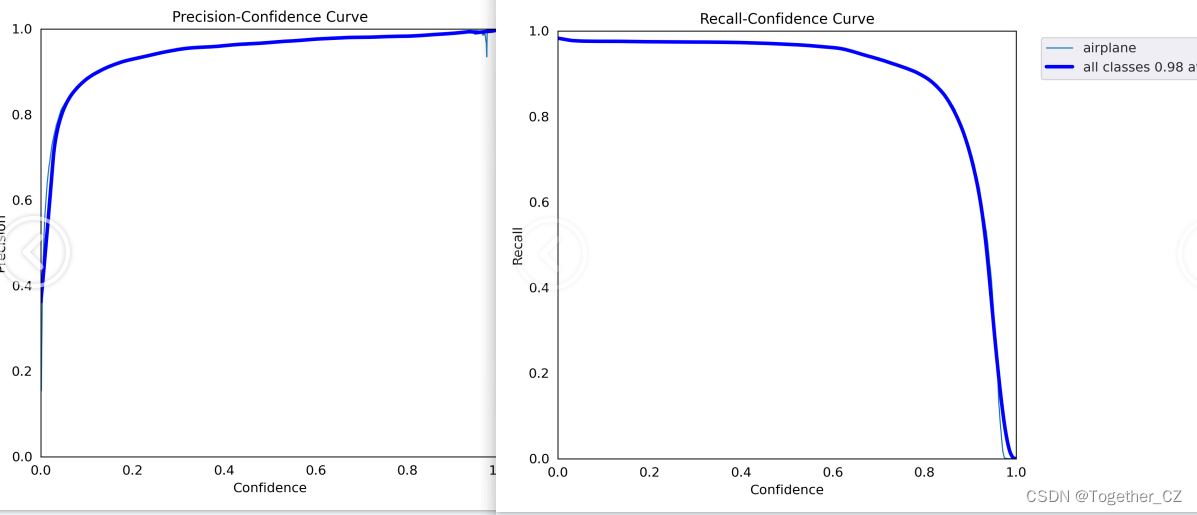
的确也是没想到,红外场景下的小目标检测效果也能这么好。